





















AV6A
7
DeviceNet Protocol “D”
The DeviceNet protocol provides a set of data bits inside a DeviceNet
message that represent the encoder position (in turns and within 1
turn).
DeviceNet may be wired in several different configurations, but the
most common is a “Trunk and Drop Line” configuration. The trunk
message cable must be terminated at each end with 120 ohm
resistors. Note that DeviceNet also offers the option to carry device
power to each encoder through an additional cable pair of wires.
Preferred cable: Nidec Avtron recommends structured DeviceNet
wiring systems, available from a broad range of vendors. Large
diameter main, small diameter round cable, as well as flat cabling
systems are all acceptable.
For more details on DeviceNet, consult the Open DeviceNet Vendor’s
Association (ODVA):
www.odva.org
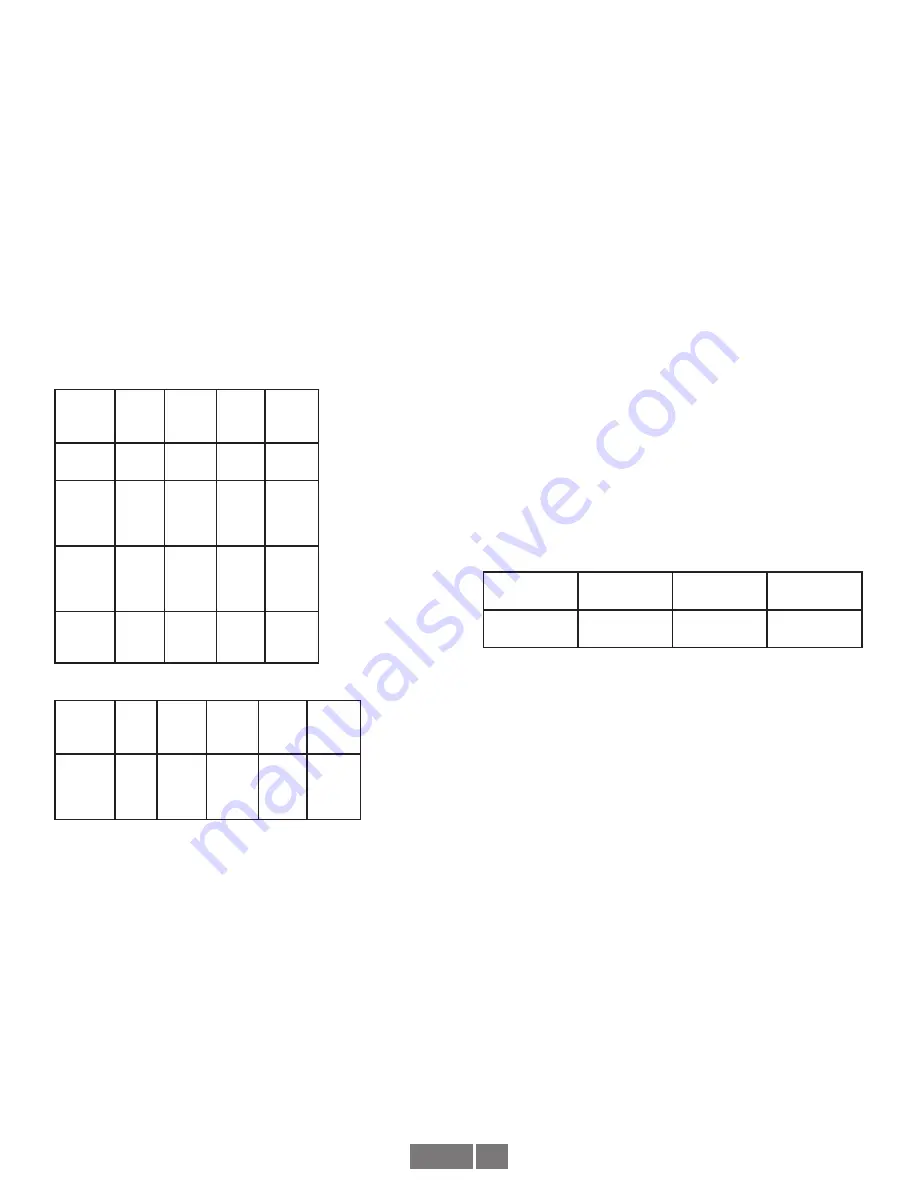
Network
Baud
Rate
500K
250K
125K Units
Max.
Length*
325
[100]
800
[250]
1600
[500]
ft
[m]
Max.
Single
Tap
Length
15
[5]
15
[5]
15
[5]
ft
[m]
Max.
Total
Tap
Length
100
[30]
200
[60]
400
[120]
ft
[m]
Min. Tap
to Tap
Length
20
[6]
20
[6]
20
[6]
ft
[m]
*Using thick cable
Number
of
Nodes
2
16
32
64
Units
Max.
Overall
Cable
Length*
750
[229]
690
[210]
640
[190]
560
[170]
ft
[m]
*Using thick cable
Setting Node (MAC-ID), Baud Rate & Termination Resistor
NOTE: Units with hardware connection caps cannot accept
software-commanded address, baud rate or termination resistor
changes. These must be made using the switches in the connection
cap. Before commencing any changes, check for a connection cap.
It is secured to the rear of the encoder with 2 or 3 screws and due
to snug fit will require a strong pull to remove it after removing the
screws.
NOTE: Any changes to baud rate, node number, or resistor will not
take effect until the encoder is reset (typically power cycled)--be
sure to store parameters in EEPROM.
NOTE: Baud rate, termination resistor and a values are not stored
permanently until they are written to EEPROM. If power is cycled
before the values are stored, the encoder will default to the values
previously stored in EEPROM.
Setting Node Number:
To set the node number on units with a connection cap: Set the
address using the two rotating switches. The node number can be
between 0-63. The node address = X10 switch * 10 + X1 switch
value.
To set the node MAC-ID number on units without a connection cap:
write attribute 6Fh (byte). [(master MAC-ID) 0x10 0x23 0x01 0x6F
(node)]. The encoder will reply [0x0A 0x90].
Setting Baud Rate:
To set the baud rate on units with a connection cap: Set the baud
rate using the rotating switch marked Bd per the table below.
To set the baud rate: write the baud code to attribute 6Eh (byte).
[(master MAC-ID) 0x10 0x23 0x01 0x6E (baud code)]. The encoder
will reply [0x0A 0x90].
Network Baud
Rate
500K
250K
125K
Baud Code/
Switch Setting
0x02
0x01
0x00
Enabling Termination Resistor:
To enable the termination resistor in units with a connection cap:
Turn switch Rt to “On”.
To enable the termination resistor: write 01 to attribute 67h. Ensure
any devices on the bus power up at least 700mS after the encoder
with the termination resistor activated.
Note that only devices at each end of the bus should have
termination resistors enabled--if the master/scanner is at one of the
bus, then only one encoder (at the opposite bus end) will require a
termination resistor.
Measuring Position, Speed, and Acceleration
Only position feedback is supported in DeviceNet; acceleration and
speed are not directly supported at this time.
To read position feedback into your device: Following the
instructions for your master/scanner module for the DeviceNet
network, load the encoder EDS file into your configuration. Assign it
to the correct MAC-ID node number. Store the configuration to the
scanner module.
All of the position data and other parameters will be read by
the scanner module and placed in registers identified in the
configuration package.
Setting Polling, Cyclic and Sync Mode
Polling, cycling and sync mode are supported by the encoder; use
the parameters supplied in the EDS file to set the appropriate mode.







































































