





























M
OVE
P
ROFILE
C
ALCULATIONS
SV160E2 User Manual
ADVANCED MICRO CONTROLS INC.
38
Constant Acceleration Equations (continued)
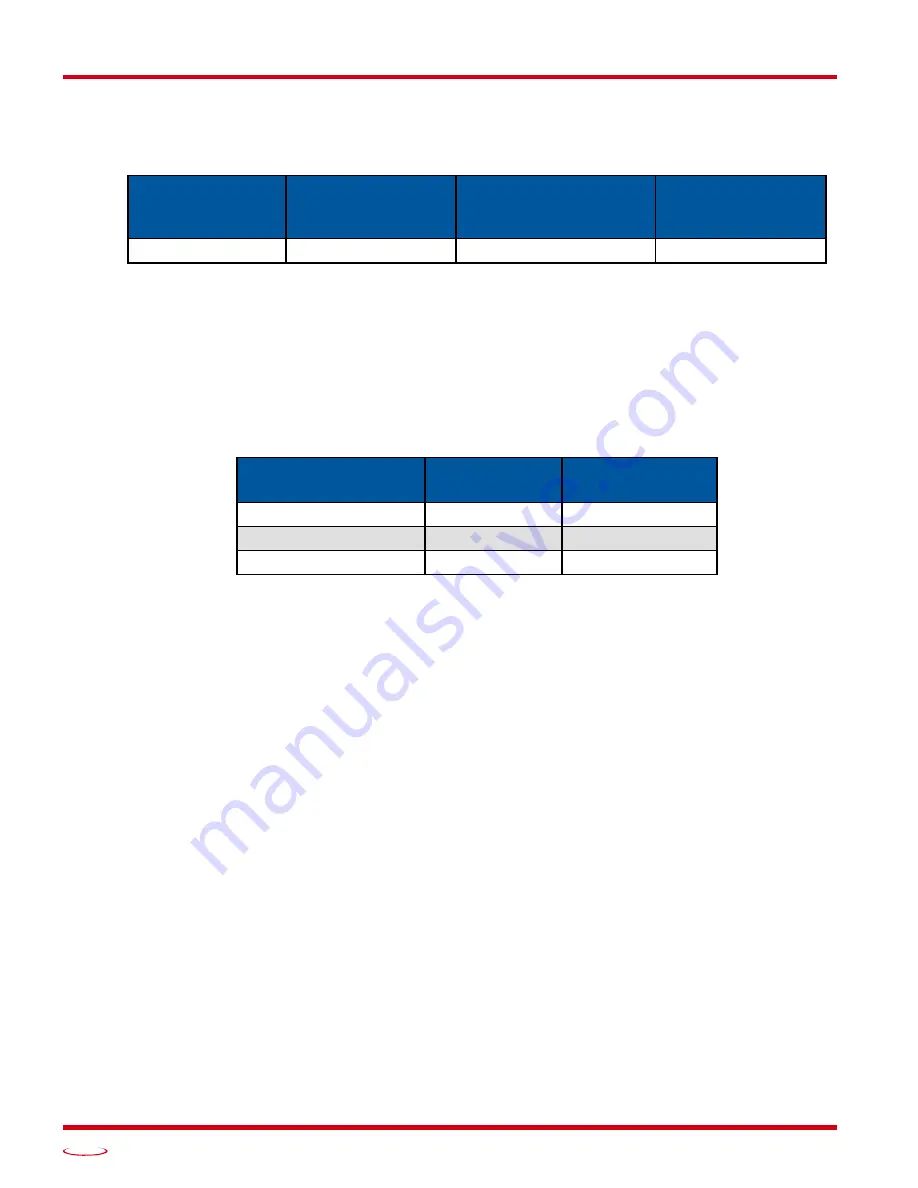
Figure R3.1 gives the equations to calculate Time, Distance, and Acceleration values for a constant accelera-
tion move.
Table R3.1 Acceleration Equations
If the sum of the D
A
and D
D
values of the move is
less than
the total number of steps in the move, your move
will have a Trapezoidal profile.
If the sum of the D
A
and D
D
values of the move is
equal to
the total number of steps in the move, your move
will have a Triangular profile and your move will reach the Programmed Speed before it begins to decelerate.
If the sum of the D
A
and D
D
values of the move is
greater than
the total number of steps in the move, your
move will have a Triangular profile and it
will not
reach the Programmed Speed before it begins to decelerate.
As an example, lets assume the values in table R3.2 for a move profile.
Table R3.2 Sample Values
Time to accelerate: T
A
= V
P
/a = 100,000/20,000 = 5.000 seconds
Time to decelerate: T
D
= V
P
/d = 100,000/25,000 = 4.000 seconds
Distance to Accelerate: D
A
= T
A
*V
P
/2 = 5.000 * 100,000/2 = 250,000 steps
Distance to Decelerate: D
D
= T
D
*V
P
/2 = 4.000 * 100,000/2 = 200,000 steps
Total Distance needed to accelerate and decelerate: 250,000 + 200,000 = 450,000 steps
If a move with the above acceleration, deceleration, and programmed speed has a length greater than 450,000
steps, the SV160E2 will generate a Trapezoidal profile. If the move is equal to 450,000 steps, the SV160E2
will generate a Triangular profile and the unit will travel at the programmed speed for one count. If the move
is less than 450,000 steps, the SV160E2 will generate a Triangular profile and the programmed speed will not
be reached.
In the case of a Triangular profile where the programmed speed is not reached, it is fairly easy to calculate the
maximum speed (V
M
) attained during the move. Because the move is always accelerating or decelerating, the
total distance traveled is equal to the sum of D
A
and D
D
.
D
A
= T
A
*V
M
/2 and T
A
= V
M
/a. By substitution:
D
A
= V
M
/a * V
M
/2 = V
M
2
/2a. By the same method,
D
D
= V
M
2
/2d.
Therefore, total distance traveled =
D
A
+ D
D
= V
M
2
/2a + V
M
2
/2d.
In the case where the acceleration and deceleration values are equal, this formula reduces to:
D
A
+ D
D
= V
M
2
/a
Acceleration Type
T
A
or T
D
(Time to Accelerate
or Decelerate)
D
A
or D
D
(Distance to Accelerate
or Decelerate)
a
(Average
Acceleration)
Linear
T
A
= V
P
/a
D
A
= T
A
*V
P
/2
a = V
P
2
/2D
A
Name
Value
SV160E2
Parameter Values
Acceleration (a)
20,000 steps/sec
2
20
Deceleration (d)
25,000 steps/sec
2
25
Programmed Speed (V
P
)
100,000 steps/sec
100,000
Содержание SV160E2
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S252 E2 Technology...
Страница 10: ...ABOUT THIS MANUAL SV160E2 User Manual ADVANCED MICRO CONTROLS INC 10 Notes...
Страница 40: ...MOVE PROFILE CALCULATIONS SV160E2 User Manual ADVANCED MICRO CONTROLS INC 40 Notes...
Страница 56: ...CONFIGURATION MODE DATA FORMAT SV160E2 User Manual ADVANCED MICRO CONTROLS INC 56 Notes...
Страница 88: ...INSTALLING THE SV160E2 SV160E2 User Manual ADVANCED MICRO CONTROLS INC 88 Notes...
Страница 108: ...ETHERNET IP EXPLICIT MESSAGING SV160E2 User Manual ADVANCED MICRO CONTROLS INC 108 Notes...
Страница 112: ...MODBUS TCP CONFIGURATION SV160E2 User Manual ADVANCED MICRO CONTROLS INC 112 Notes...
Страница 120: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...