
















2
Rockwell Automation Publication VPL-IN001E-EN-P - August 2016
Kinetix VP Low Inertia Servo Motors with 063…165 mm Frame Size
Catalog Number Explanation
(1)
This encoder option is available with only VPL-A/B100
xx
, VPL-A/B115
xx
, VPL-A/B130
xx
, and VPL-B165
xx
motor frame sizes.
(2)
This encoder option is available with only VPL-B063
xx
and VPL-B075
xx
motor frame sizes.
(3)
Rated speed hierarchy is only for comparative purposes. Use Motion Analyzer software to size and select motors for your application, and/or the torque/speed curves in the Kinetix 5500 Drive System Design Guide, publication
KNX-RM009
and the Kinetix 5700 Drive System Design Guide, publication
KNX-RM010
.
(4)
Refer to
Motor Dimensions (063 mm and 075 mm frame sizes)
on
page 7
and
Motor Dimensions (100…165 mm frame sizes)
on
page 8
for dimensional changes (L, LB, LD, and LE) that result from the number of magnet stacks.
Before You Install the Motor
Perform these inspection steps and review the guidelines for shaft seals, couplings and pulleys, and electrical noise prevention.
1. Remove the motor carefully from its shipping container.
2. Inspect the motor for any damage.
3. Examine the motor frame, front output shaft, and mounting pilot for any defects.
4. Notify the carrier of shipping damage immediately.
Remove the Shaft Cap
Remove the protective cap installed on the motor shaft with your hand or by prying it off with a screwdriver. Do not use a hammer or other tools as
they can damage the motor shaft.
ATTENTION:
Do not attempt to open and modify the motor beyond changing the connector orientation as described on
page 5
. Only a qualified Rockwell
Automation employee can service this motor.
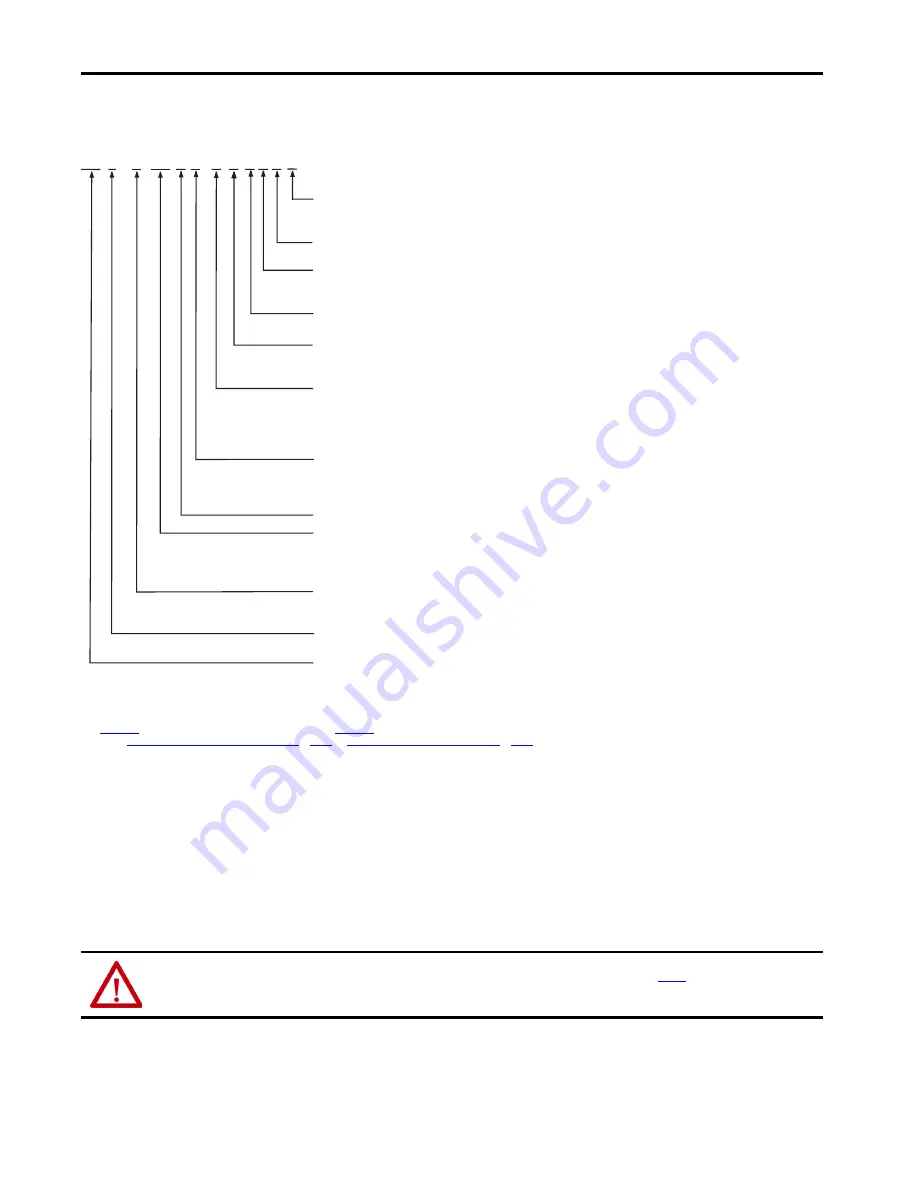
VP L -
x xxx x x - x x
1
x
A
x
Factory Options
A = Standard
S = Shaft seal
Mounting Flange
A = IEC metric, free mounting holes (type FF)
Brake
2 = No Brake
4 = 24V DC Brake
Shaft Key
J = Shaft key
K = Smooth shaft
Connector
1 = Single SpeedTec DIN connector, right angle, 325° rotatable
Feedback
C = 18-bit absolute single-turn digital encoder (Hiperface DSL protocol)
P = 18-bit absolute multi-turn (4096 revolutions) digital encoder (Hiperface DSL protocol)
Q = 23-bit absolute multi-turn digital encoder (Hiperface DSL protocol) SIL2/PLd rated, 12-bit secondary safety channel
(1)
W = 18-bit absolute multi-turn digital encoder (Hiperface DSL protocol) SIL2/PLd rated, 9-bit secondary safety channel
(2)
Rated Speed
(3)
A = 1500 rpm
D = 3000 rpm
M= 6000 rpm
B = 2000 rpm
E = 3500 rpm
T = 6750 rpm
C = 2500 rpm
F = 4500 rpm
U = 8000 rpm
Magnet Stack Length (1, 2, 3, 4, 6 stacks)
(4)
Frame Size - Bolt Circle Diameter (BCD)
063 = 63 mm
115 = 115 mm
075 = 75 mm
130 = 130 mm
100 = 100 mm
165 = 165 mm
Voltage Class
A = 200V
B = 400V
Series Type
L = Low Inertia
Series
VP = Permanent magnet rotary servo motors optimized to the ratings of Kinetix 5500 and Kinetix 5700 servo drives.