





























44
•
Operation Theorem
4.1.6 Home Return Mode
In this mode, you can let the PCI-8132 output pulses until the conditions to
complete the home return is satisfied after writing the
_8132_home_move()
command. Finish of home return can be checked
by
_8132_motion_done()
function. Or you can check finish of home
return accompanied with the interrupt function by setting bit 5 of
int_factor
to 1 in
_8132_
set_int_factor()
function.
Moving direction of motors in this mode is determined by the sign of
velocity parameter in
_8132_home_move()
function. A
_8132_v_stop()
command during returning home can stop OUT and DIR from outputting
pulses.
Before writing
_8132_home_move()
command, configuration must be set
by
_8132_set_home_config()
function. . See also Section 4.3.3 for
further description. There are total three home return modes can be
selected by setting home_mode parameter in
_8132_set_home_config()
function. The meaning of Home_mode will be described as the following:
1
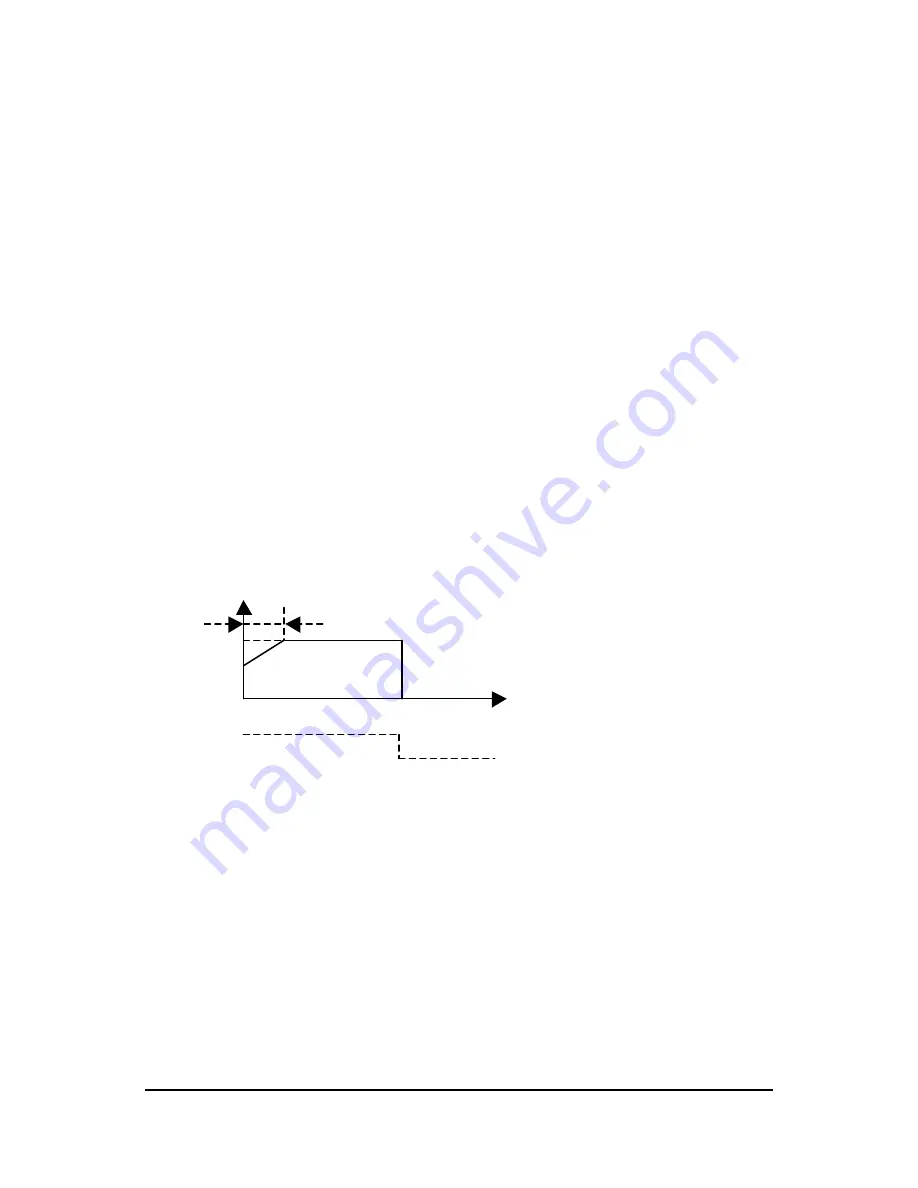
. Home_mode=0: ORG only, no index signal. The ORG signal
immediately stops OUT and DIR pins from outputting pulses to
complete the origin return.
time
•
mvel
svel
Velocity
accel
ORG
•
Writing home-move( )
command to begin home
return operation
‚
ORG Signal ON
Содержание PCI-8132
Страница 1: ...PCI 8132 2 Axes Servo Stepper Motion Control Card User s Guide ...
Страница 2: ......







































































