


















1.6 Mounting equipment
1.6.1 Information about mounting equipment
General
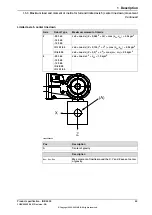
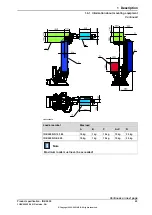
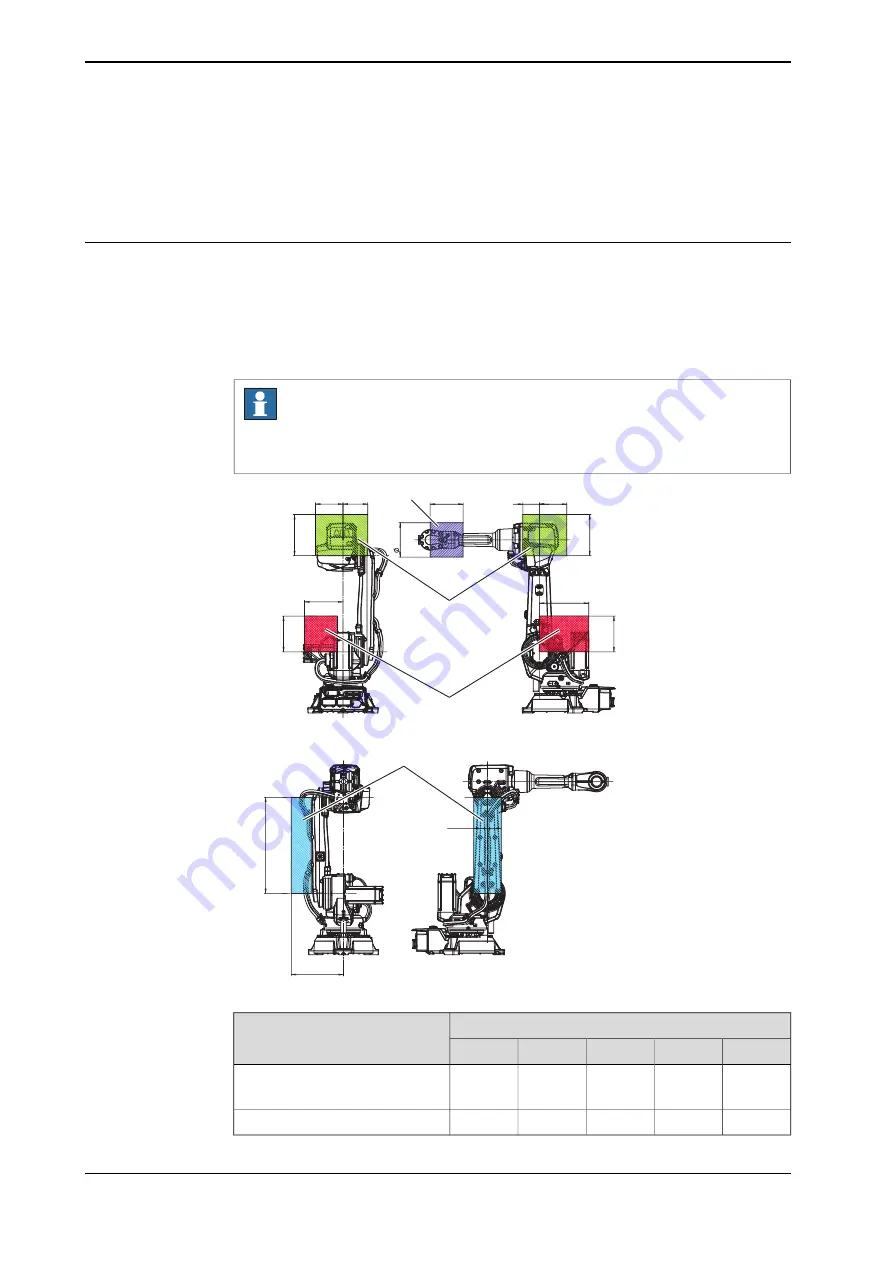
Extra loads can be mounted on the wrist, the upper arm housing and on the frame.
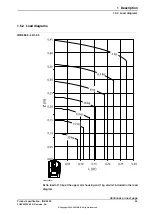
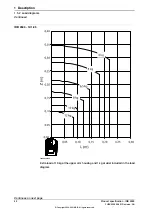
Definitions of load areas and permitted load are shown in. The center of gravity of
the extra load shall be within the marked load areas. The robot is supplied with
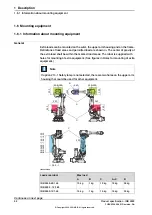
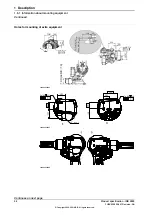
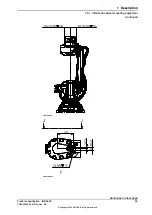
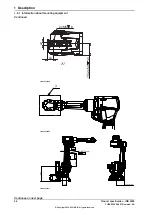
holes for mounting of extra equipment. (See figures in Holes for mounting of extra
equipment.)
Note
If option 213-1 Safety lamp is not selected, there are two holes on the upper arm
housing that could be used for other equipment.
250
240
260
360
300
120 200
200
260
300
280
180
A
B
D
380
200
C
IRB 2600 -1.65 = 700
IRB 2600 -1.85 = 900
xx0900000189
Max load
Load area robot
D
A+C
C
B
A
35 kg
10 kg
10 kg
1 kg
10 kg
IRB 2600-20/1.65
IRB 2600 - 12/1.85
35 kg
15 kg
15 kg
1 kg
15 kg
IRB 2600-12/1.65
Continues on next page
52
Product specification - IRB 2600
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.6.1 Information about mounting equipment
Содержание IRB 2600
Страница 1: ...ROBOTICS Product specification IRB 2600 ...
Страница 2: ...Trace back information Workspace 21C version a3 Checked in 2021 09 23 Skribenta version 5 4 005 ...
Страница 6: ...This page is intentionally left blank ...
Страница 10: ...This page is intentionally left blank ...
Страница 92: ...This page is intentionally left blank ...
Страница 94: ...This page is intentionally left blank ...
Страница 96: ......
Страница 97: ......







































































