


























G
G
Ø0.5 AB
Ø60
C
C
(3
X1
20
º)
B
B
D
0
.5
A
A
5
0
0
4
3
5
216.5
433 ±0.5
M 16 x20 Min
A-A
B-B
M 16 x20 Min
2x Ø 90
2x Ø 90
10
(37)
10
+0.024
-0.015
J8
Ø35
1x45º
1.6
C-C
(433±0.5)
B
R
+0
.0
2
4
-0
.0
1
5
J8
Ø
3
5
1
1.6
2.5
25
2x 1x45º
Ø
2
2
-0
.0
2
5
-0
.0
5
0
f7
Ø
3
5
(A)
A
(C
)
(D)
E
F
Ø
Ø
M 16 x 30 Min
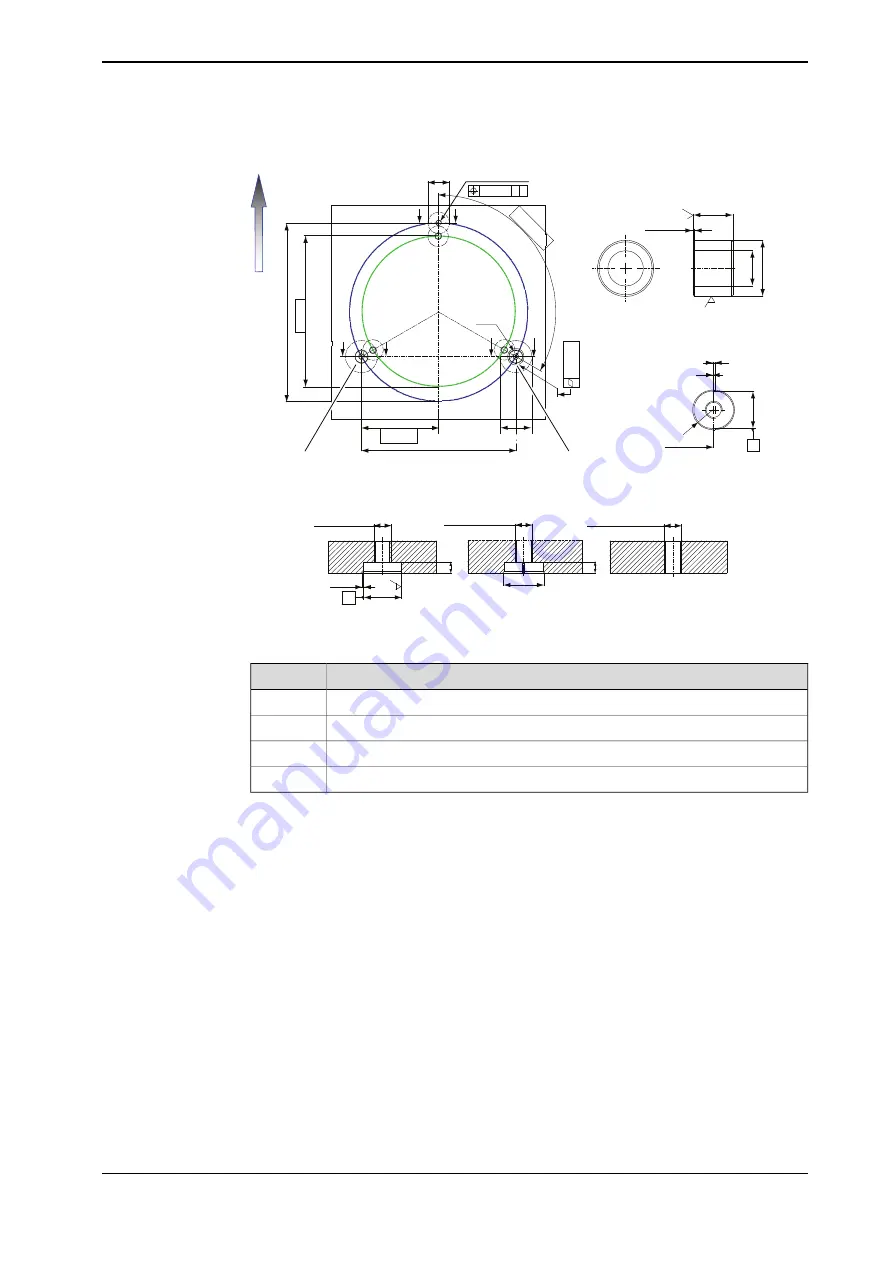
xx0900000392
Description
Pos
3x common zone
(C)
Position of the front of the robot
E
1xM16, depth 30 minimum
F
Guide sleeves (2 pcs)
G
Product specification - IRB 2600
27
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.3.3 Mounting the manipulator
Continued
Содержание IRB 2600
Страница 1: ...ROBOTICS Product specification IRB 2600 ...
Страница 2: ...Trace back information Workspace 21C version a3 Checked in 2021 09 23 Skribenta version 5 4 005 ...
Страница 6: ...This page is intentionally left blank ...
Страница 10: ...This page is intentionally left blank ...
Страница 92: ...This page is intentionally left blank ...
Страница 94: ...This page is intentionally left blank ...
Страница 96: ......
Страница 97: ......





















































