

















YASKAWA
TOEPC71061782C GA800 Drive Installation & Primary Operation
99
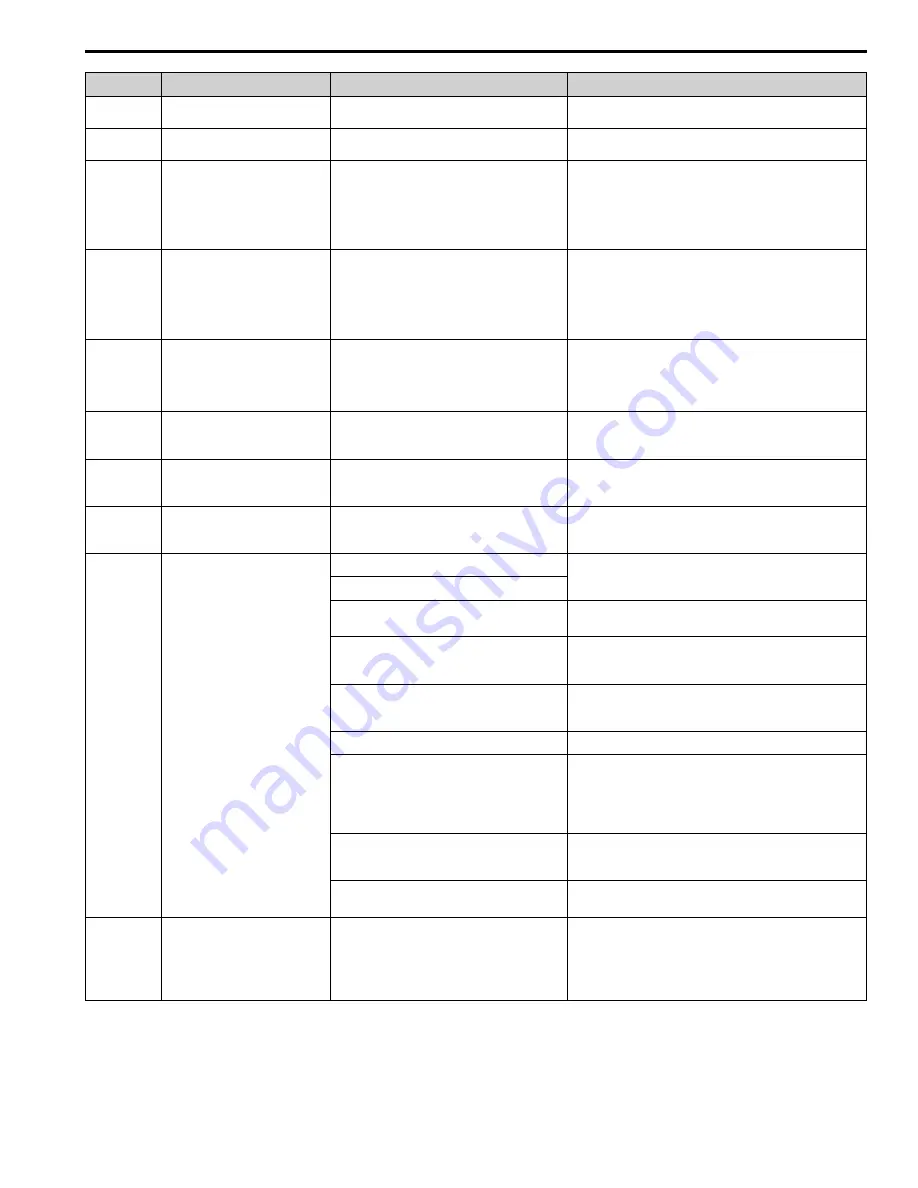
Code
Name
Causes
Possible Solutions
The drive could not complete tuning for leakage
inductance in fewer than 300 seconds.
Examine and repair motor wiring.
Er-14
Motor Speed Error 2
The motor speed was more than two times the
amplitude of speed reference during Inertia Tuning.
Decrease the value set in
C5-01 [ASR Proportional Gain 1]
.
Er-15
Torque Saturation Error
During Inertia Tuning, the output torque was more
than the value set in
L7-01 to L7-04 [Torque Limit]
.
•
Increase the value set in
L7-01 to L7-04 [Torque Limit]
as much
as possible.
•
Decrease the values set for the frequency and amplitude of the
test signals used when doing inertia tuning. First, decrease the
test signal amplitude, and then do Inertia Tuning. If the error
continues, decrease the test signal frequency and do Inertia
Tuning again.
Er-16
Inertia ID Error
The inertia found by the drive was too small or too
large during Inertia Tuning (10% or less, or 50000%
or more).
•
Decrease the values set for the frequency and amplitude of the
test signals used when doing inertia tuning. First, decrease the
test signal amplitude, and then do Inertia Tuning. If the error
continues, decrease the test signal frequency and do Inertia
Tuning again
•
Correctly set the motor inertia as specified by the motor, and do
Inertia Tuning again.
Er-17
Reverse Prohibited Error
b1-04 = 1 [Reverse Operation Selection = Reverse
Disabled]
Note:
You cannot do Inertia Tuning if the drive cannot
rotate the motor in reverse.
1.
Enable reverse in the target machine.
2.
Set
b1-04 = 0 [Reverse Enabled]
.
3.
Do Inertia Tuning again.
Er-18
Back EMF Error
The result of the induced voltage tuning was not in
the applicable range.
1.
Make sure that the input motor nameplate data is correct.
2.
Do Auto-Tuning again and correctly set the motor nameplate
data.
Er-19
PM Inductance Error
The Auto-Tuning results of the PM motor inductance
were not in the applicable range.
1.
Make sure that the input motor nameplate data is correct.
2.
Do Auto-Tuning again and correctly set the motor nameplate
data.
Er-20
Stator Resistance Error
The Auto-Tuning results of the PM Motor Stator
Resistance were not in the applicable range.
1.
Make sure that the input motor nameplate data is correct.
2.
Do Auto-Tuning again and correctly set the motor nameplate
data.
Er-21
Z Pulse Correction Error
The motor is wired incorrectly.
The encoder is wired incorrectly.
1.
Repair motor and encoder wiring errors.
2.
Do Z Pulse Offset Tuning again.
You did Auto-Tuning on a coasting motor.
1.
Wait for the motor to fully stop.
2.
Do Z Pulse Offset Tuning again.
The setting for the direction of the encoder motor
rotation is incorrect.
1.
Set the direction of motor rotation of the encoder in
F1-05
[Encoder 1 Rotation Selection]
correctly.
2.
Do Z Pulse Offset Tuning again.
The number of encoder pulses is incorrect.
1.
Set the number of encoder pulses in
F1-01 [Encoder 1 Pulse
Count (PPR)]
correctly.
2.
Do Z Pulse Offset Tuning again.
The motor Inertia is too large.
Increase the value set in
n8-02 [Pole Alignment Current Level]
.
Parameter
b1-04 = 1 [Reverse Operation Selection =
Reverse Disabled]
and you did Z Pulse Offset
Tuning.
•
If the machine prevents reverse rotation, disconnect the motor
from the machinery, set
b1-04 = 0 [Reverse Enabled]
, then do Z
Pulse Offset Tuning. When tuning is complete, set
b1-04 = 1
[Reverse Disabled]
.
•
If the machine does not prevent reverse rotation, set
b1-04 = 0
and do Z Pulse Offset Tuning.
The motor vibrates during tuning.
•
Increase the values set in
n8-03 [Pole Position Detection Time]
and
n8-04 [Pole Alignment Time]
.
•
Decrease the value set in
n8-02 [Pole Alignment Current Level]
.
The encoder is damaged.
•
Examine the signal output from the encoder.
•
Replace the encoder.
Er-25
HighFreq Inject Param Tuning Err
The motor data is incorrect.
Do Stationary Auto-Tuning again.
Note:
If the drive detects
Er-25
after doing Stationary Auto-Tuning,
the motor may not be able to use high frequency injection
control. Contact Yaskawa or your nearest sales representative
for more information.







































































