










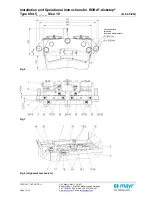










Installation and Operational Instructions for ROBA
®
-diskstop
®
Type 894.5_ _._ _ Size 10
(B.8.4.5.EN)
23/03/2017 TK/TL/GC/SU
Chr. Mayr GmbH + Co. KG
Eichenstraße 1, D-87665 Mauerstetten, Germany
Tel.: +49 8341 804-0, Fax: +49 8341 804-421
Page 10 of 16
www.mayr.com
, E-Mail:
Table 2: Switching Times [ms]
Design
min. nominal braking force
max. nominal braking force
Attraction t
2
:
650
650
Drop-out t
0
(DC) from holding voltage / overexcitation:
210 / 260
55 / 60
Drop-out t
50
(DC)
2)
from holding voltage / overexcitation:
320 / 340
100 / 110
Drop-out t
90
(DC)
3)
from holding voltage / overexcitation:
720 / 750
360 / 380
Drop-out t
11
(AC):
600
600
Drop-out t
1
(AC):
1000
1000
2)
Referring to the effective braking force
3)
Referring to the nominal braking force
The stated switching times can only be achieved using the respective correct electrical wiring. This also refers to the
protection circuit for brake control and the response delay times of all control components.
The use of varistors for spark quenching increases the DC-side switching times.
Diagram 2: Torque-Time Diagram
Key
M
Br
= Braking torque
M
L
= Load torque
t
1
= Connection time
t
11
= Response delay on connection
(
≙
t
0
acc. Type Examination Certificate)
t
2
= Separation time
t
4
= Slip time + t
11
t
O
= Overexcitation time
U
N
= Coil nominal voltage
U
H
= Holding voltage
U
O
= Overexcitation voltage
The switching times are dependent on
the respective spring pressure.
U
O
M
Br
0.1 x M
Br
M
L
t
11
t
1
t
2
t
O
U
M
t
t
t
4
U
H







































































