





























17
Figure 2-12 Keyway and scale zero mark
2.3.2 Battery replacement
When the encoder battery low voltage alarm occurs, the battery needs to be replaced.
During annual maintenance, the battery voltage needs to be checked. The specific
operation is as follows: open the small cover plate of the encoder battery on the back of the
robot base, and measure the battery voltage with a multimeter. The normal rated voltage is
3.6V. When the voltage is lower than 3.2V, the battery needs to be replaced.
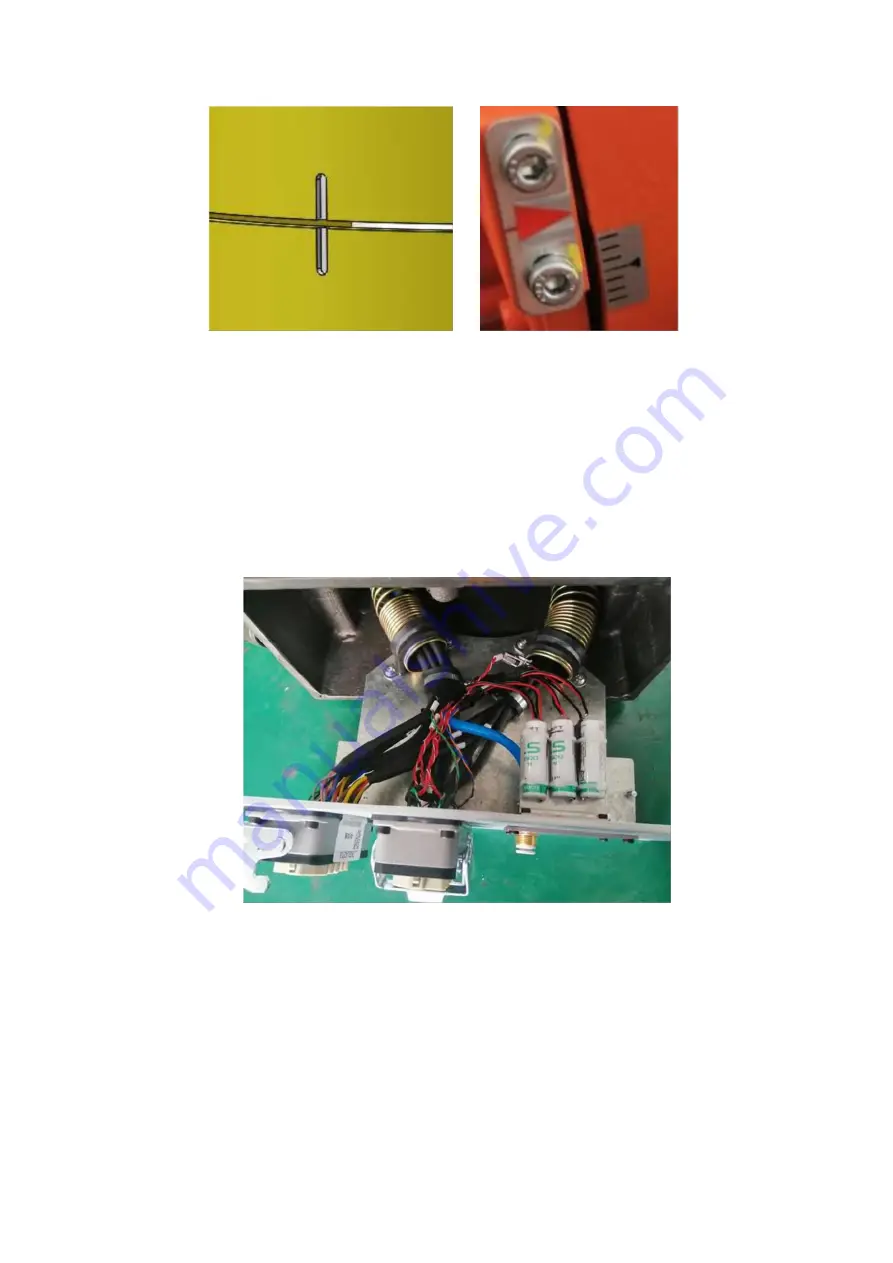
The encoder batteries of Turing robots are all installed on the back cover of the base,
and the battery can be replaced by removing the back cover (some models have a small
battery cover, only need to remove the small cover to replace the battery).
Figure 2-13 Six-axis robot encoder battery





















































