





























16
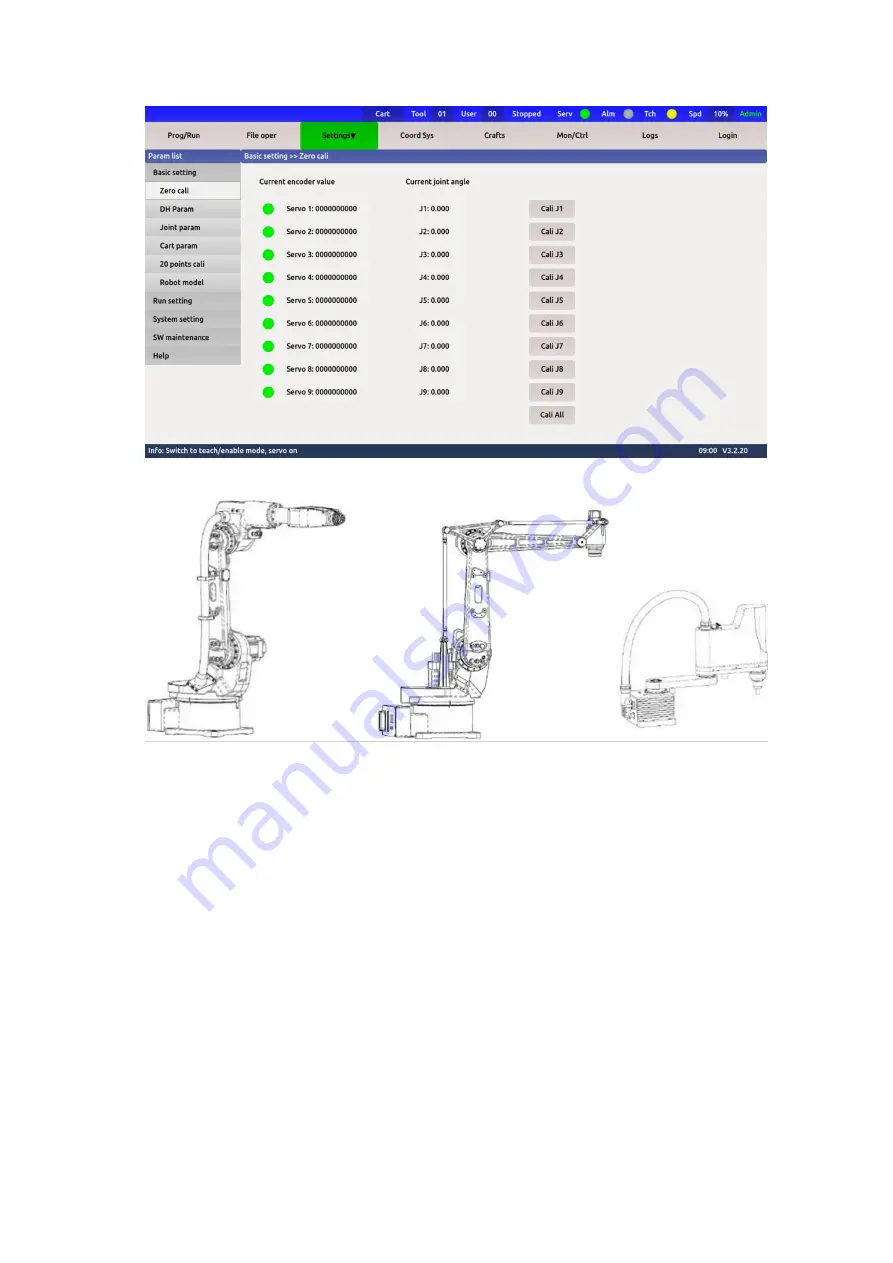
Figure 2-10 Robot zero calibration
When the robot is in the zero position, its posture is as shown below.
Figure 2-11 Zero position robot
When the robot zero position is lost, it is necessary to make a preliminary judgment to
determine the zero position, and then use the software to correct the deviation (see 2.3.3).
There are the following methods to judge the zero position initially:
◆
Visually or with the aid of a spirit level to observe the robot arm horizontal or
vertical
◆
Align the zero mark of each joint of the robot
The zero marks of different robots will be slightly different. The following are two
basic marks.





































































