





























TMCM-6212 TMCL
™
Firmware Manual • Firmware Version V1.11 | Document Revision V1.07 • 2019-JAN-25
115 / 140
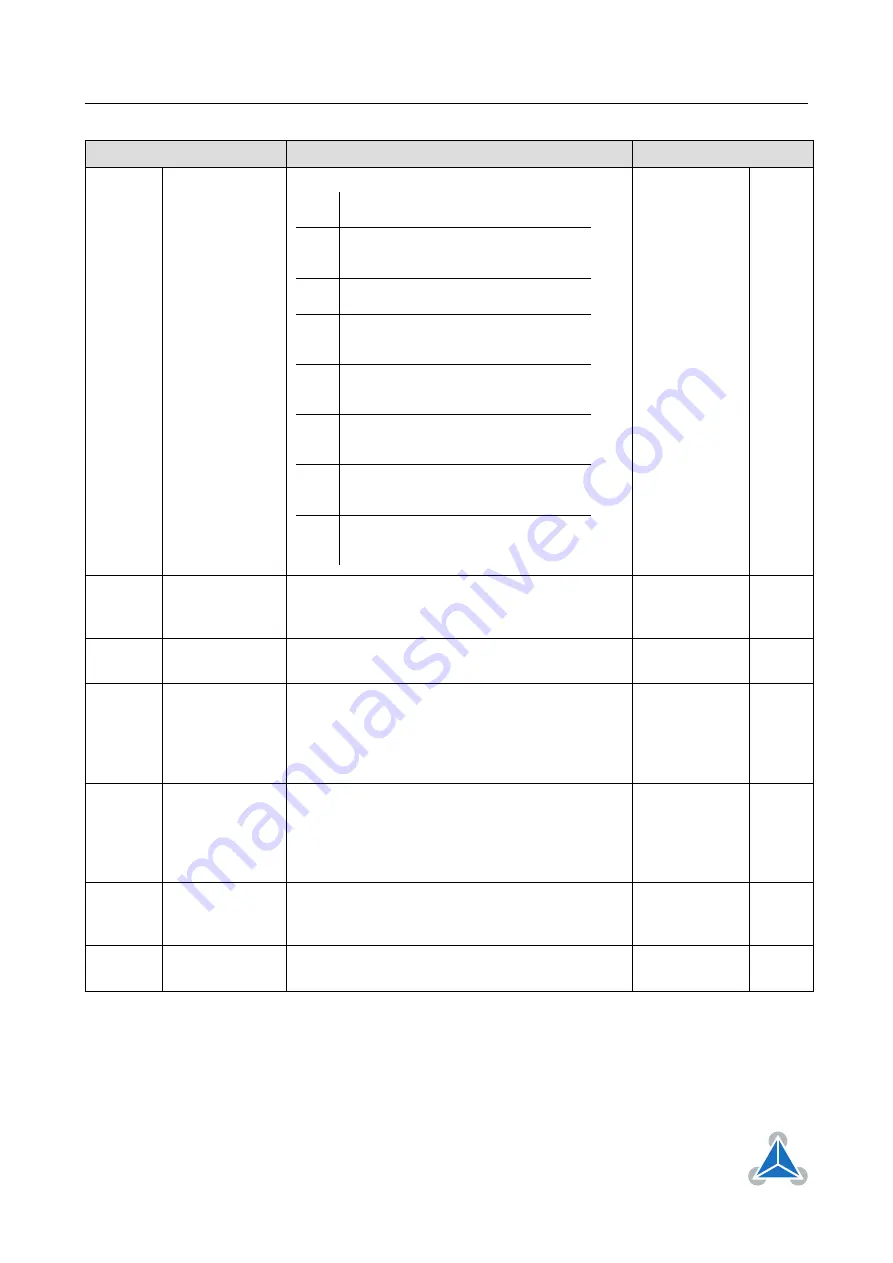
Number
Axis Parameter
Description
Range [Units]
Access
208
Motor driver
error flags
A
combination
of
the
following
values:
Bit 0
StallGuard2 status
(1: stall detected)
Bit 1
Overtemperature
(1: driver is shut down due to overtemper-
ature)
Bit 2
Overtemperature pre-warning
(1: temperature threshold is exceeded)
Bit 3
Short to ground A
(1: short condition detected, driver cur-
rently shut down)
Bit 4
Short to ground B
(1: short condition detected, driver cur-
rently shut down)
Bit 5
Open load A
(1: no chopper event has happened during
the last period with constant coil polarity)
Bit 6
Open load B
(1: no chopper event has happened during
the last period with constant coil polarity)
Bit 7
Stand still
(1: no step pulse occurred during the last
2
20
clock cycles)
0. . . 255
R
209
Encoder
position
Encoder counter value.
-2147483648
. . . 2147483647
[µsteps]
RW
210
Encoder
resolution
Encoder counts per round.
0. . . 65535
RW
212
Maximum
encoder
deviation
When the actual position (parameter 1) and the
encoder position (parameter 209) differ more
than set here the motor will be stopped. This
function is switched off when the maximum de-
viation is set to zero.
0. . . 65535
[encoder
steps]
RW
213
Group index
All motors on the module which have the same
group index will get the same commands when
a ROL, ROR, MST, MVP or RFS is issued for one
of these motors. Setting the group index to 0
(default) turns off this feature for the motor.
0. . . 255
RW
214
Power down
delay
Standstill period before the current will be
ramped down to standby current. The standard
value is 200 (which means 2000ms).
0. . . 417
[10ms]
RW
251
Reverse shaft
Reverse the rotation direction of the motor
shaft.
0/1
RW
©2019 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at





















































