





























TMCM-6212 TMCL
™
Firmware Manual • Firmware Version V1.11 | Document Revision V1.07 • 2019-JAN-25
109 / 140
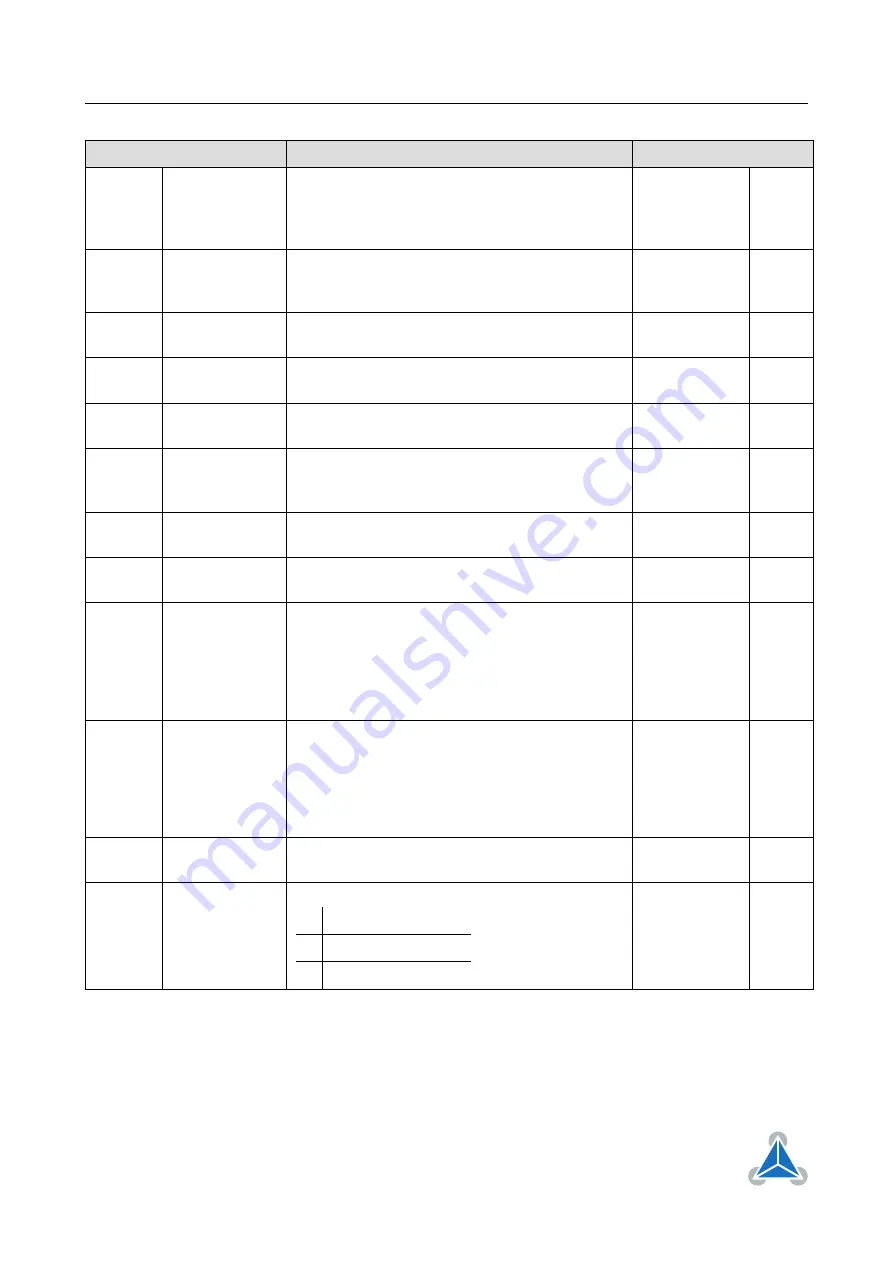
Number
Axis Parameter
Description
Range [Units]
Access
22
Speed
threshold for
CoolStep /
fullstep
Speed threshold for de-activating CoolStep or
switching to fullstep mode.
0. . . 7999774
[pps]
RW
23
Minimum
speed for
DcStep
Minimum speed for switching to DcStep.
0. . . 7999774
[pps]
RW
24
Right limit
switch polarity
Setting this parameter to 1 inverts the logic state
of the right limit switch input.
0/1
RW
25
Left limit
switch polarity
Setting this parameter to 1 inverts the logic state
of the left limit switch input.
0/1
RW
26
Soft stop
enable
Use soft stop when motor is stopped by a limit
switch.
0/1
RW
27
High speed
chopper mode
Switch to other chopper mode when measured
speed is higher than axis parameter 22 when set
to 1.
0/1
RW
28
High speed
fullstep mode
Switch to fullstep mode when measured speed
is higher than axis parameter 22 when set ot 1.
0/1
RW
29
Measured
speed
Speed measured by the motor driver.
0. . . 7999774
[pps]
R
31
Power down
ramp
Controls the number of clock cycles for motor
power down after a motion as soon as the motor
has stopped and the setting time has expired.
The smooth transition avoids a motor jerk upon
power down. 0=instant power down, 15=longest
possible power down ramp.
0. . . 15
[0.16384s]
RW
32
DcStep time
This setting controls the reference pulse width
for DcStep load measurement. It must be opti-
mized for robust operation with maximum mo-
tor torque. A higher value allows higher torque
and higher velocity, a lower value allows opera-
tion down to a lower velocity as set by VDCMIN.
0. . . 1023
RW
33
DcStep
StallGuard
This setting controls stall detection in DcStep
mode. Increase for higher sensitivity.
0. . . 255
RW
127
Relative
positioning
option
Start
position
for
MVP
REL
command:
0
last target position
1
actual position
2
encoder position
0. . . 2
RW
©2019 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at