Configuration and Parameterization
TR-Electronic GmbH 2016, All Rights Reserved
Printed in the Federal Republic of Germany
Page 80 of 103
TR - ECE - BA - DGB - 0131 - 02
10/31/2018
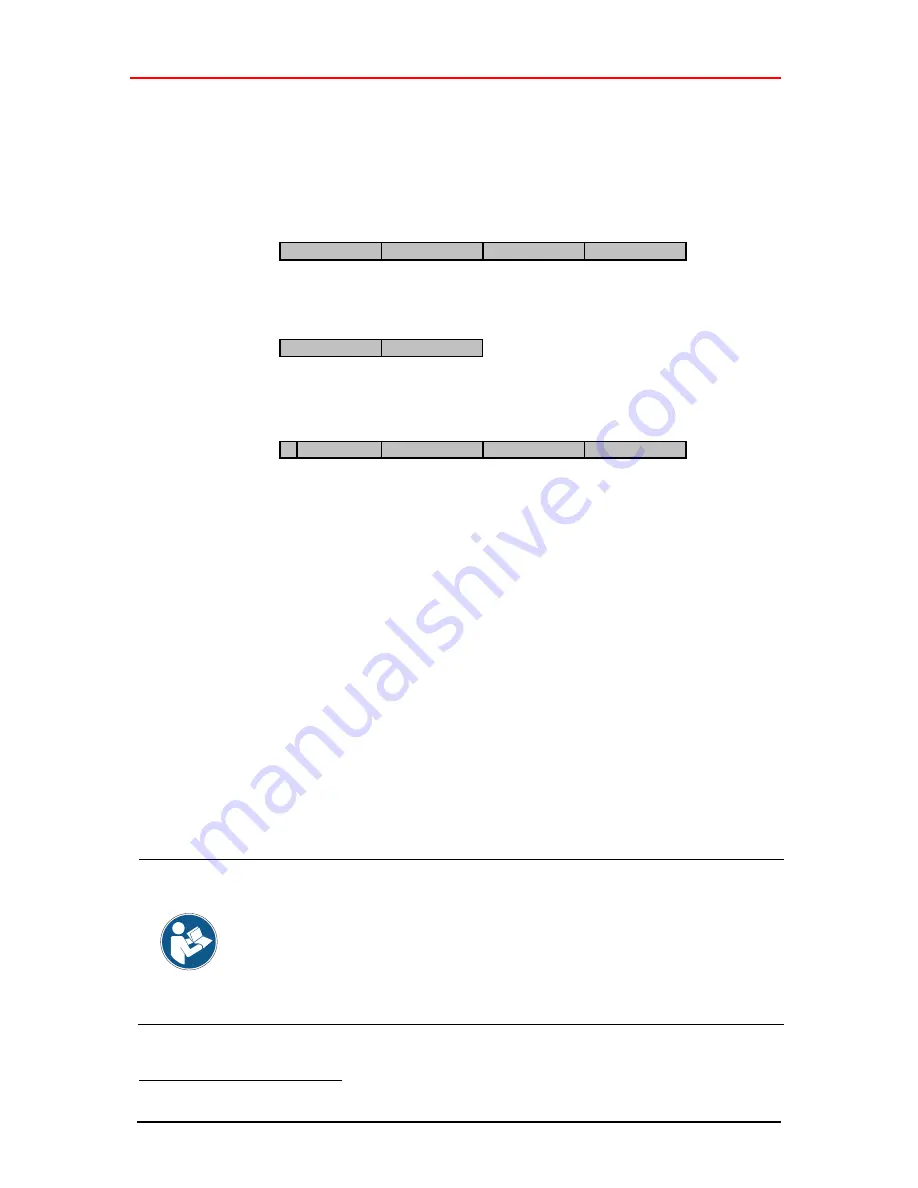
6.2.6 TR-mode pRpm., identifier 0xF1, 0xD0
The measuring system uses two input words for the position plus a separate input word
for the velocity, and two output words which are consistently transferred via the bus. The
velocity is output with a sign in revolutions per minute and has an accuracy of +/- 1 rpm.
Double input word ID x
Data byte 3
Data byte 2
Data byte 1
Data byte 0
LSB
MSB
Input byte x+0
Input byte x+1
Input byte x+2
Input byte x+3
Input word IW x
Data byte 1
Data byte 0
LSB
MSB
Input byte x+0
Input byte x+1
Double output word for preset adjustment OD x
Data byte 3
Data byte 2
Data byte 1
Data byte 0
LSB
MSB
Output byte x+0
Output byte x+1
Output byte x+2
Output byte x+3
P
P = Preset adjustment
Relevant parameter data:
•
Count sequence
•
Commissioning diagnostics
•
Commissioning function
•
Short diagnostics (16 byte)
•
Total measuring range/units
•
Revolutions numerator
•
Revolutions denominator
•
SSI code
4
•
SSI data bit count
•
Profibus code
•
Preset value 1
•
Preset value 2
•
Limit switch lower limit
•
Limit switch upper limit
•
Rpm. multiplier [1/n rpm]
The configurations designated "TR-mode" are not compatible with the PNO encoder
profile in terms of the parameter record. The scaling function prescribed by the PNO
profile is a simple special case of a general gear. Due to the extended 'gear' scaling
function, additional parameters are therefore necessary in order to describe the gear
fully.
In other words, the TR-specific modes represent an extension of the measuring
system function which is not restricted by its compatibility with the PROFIBUS-DP
and certification.
4
SSI on request, no standard