

























Thomson
Thomson Electrak
®
MD Actuator - Installation Manual - 2020-02
11
4.6.1 General notes
• Avoid placing signal cables along power cables to reduce the risk of interference.
• Do not use vehicle earth as the return conductor. Instead use a two wire system to reduce
the risk of interference.
• In very sensitive applications or where there is a risk of interference we recommend using
shielded signal cables.
• Keep in mind that long cables in combination with small lead cross sections and low voltages
may lead to undervoltage and malfunction due to voltage drop.
• Relays or other coil operated devices should have spark protection to avoid interference.
• Never work on the actuator or the wiring with the power switched on!
4.6.2 Speed control by adjusting the input voltage
Only Electrak MD actuators equipped with control option XXX or XXP can be speed controlled
adjusting the input voltage (including by means of Pulse Width Modulation (PWM)). All other
control options cannot. Instead, depending on type of control and voltage adjustment method
attempted to use, the control will either keep the speed, stop or be permanently damaged and
cause malfunction.
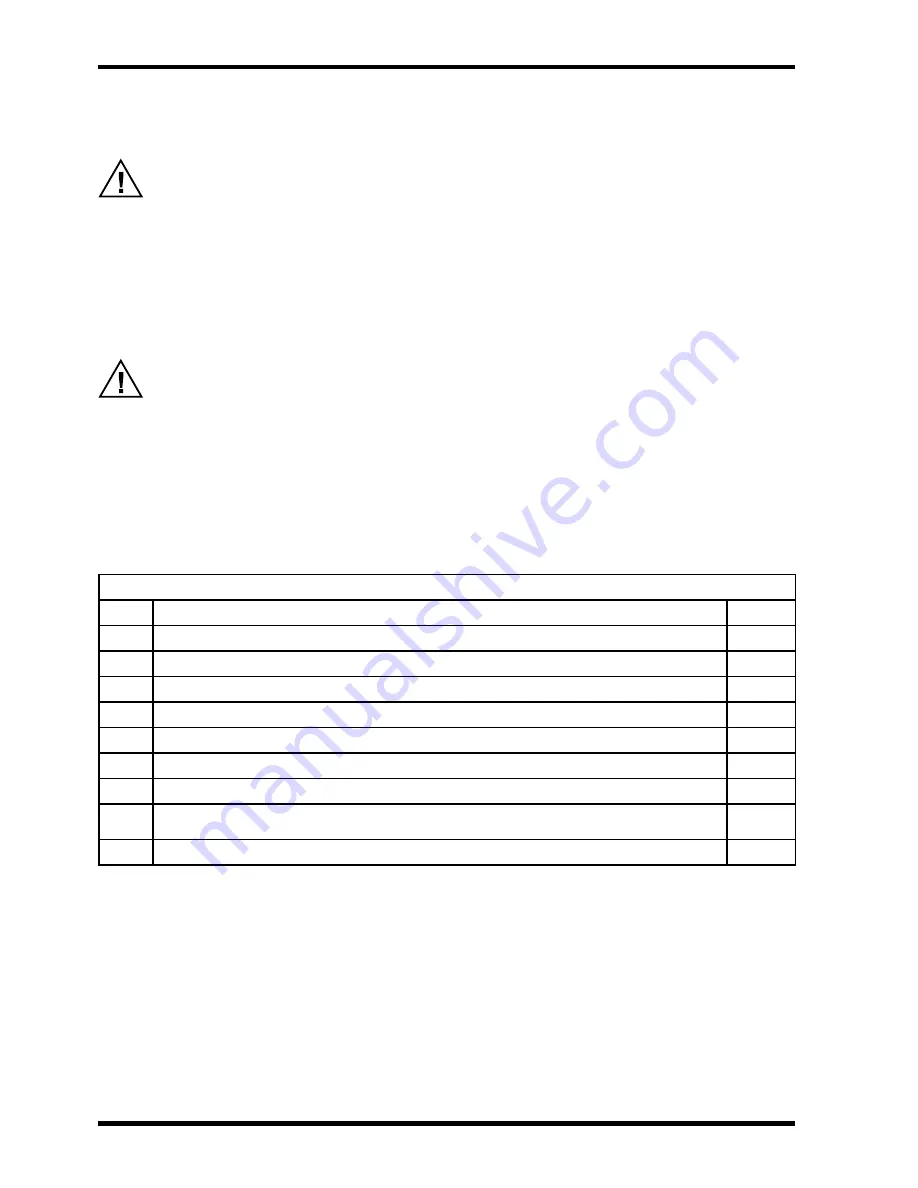
4.6.3 How to determine the control option
Electrak MD is equipped with one of the control options in the table below. To determine the option
your actuator has, check the model number on the product label on the actuator (section 4.1) and then
check the ordering key (section 7.2). Use the table below and go to the corresponding section for further
information.
4.6 Control options installation and operation
Control Options
Option Functions
Section
XXX
Internal End-of-Stroke Limit Switches
4.6.4
XXP
Internal End-of-Stroke Limit Sw Analog Position Output
4.6.5
EXX
Electrak Monitoring Package
4.6.6
EXP
Electrak Monitoring P Analog Position Output
4.6.7
LXX
Electrak Monitoring P Low Level Signal Motor Switching
4.6.8
LLX
Electrak Monitoring P Low Level Signal Motor Swi End of Stroke Indication Output
4.6.9
LXP
Electrak Monitoring P Low Level Signal Motor Swi Analog Position Output
4.6.10
LLP
Electrak Monitoring P Low Level Signal Motor Swi End of Stroke Indication
Analog Position Output
4.6.11
CNO
CAN Bus J1939 C Open Loop Speed Control
4.6.12







































































