





























8.5.2.2
Brake
A failsafe brake is integrated into the motor adapter. It has the function of a holding brake. Braking from full
speed, e.g. in case of a voltage drop or an emergency off in hazard situations, is still possible.
The brake can be used as a single brake or together with the motor brake as a redundant brake system.
Function
The brakes installed in the motor adapter are electrically actuated spring-loaded brakes for dry running. In
the de-energized state, braking takes place using spring force. The brake is released by an electromagnetic
DC coil before the motor is switched on. The switch-on time t
2B
(release time) is the time until the anchor
plate releases from the axially moving brake disc and is magnetically held to the coil body. In this state, the
brake is released and the coupling hub can rotate. In order to switch off (motor and brake), the residual
magnetic flux of the iron parts (anchor and coil body) must be reduced; the associated time t
11B
until the
start of torque generation is defined as a response delay when linking. The link time t
1B
is the time until the
braking torque has built up to the nominal braking torque.
Manual release
Optionally, the brake can be equipped with a manual release.
Pressing the manual release deactivates the electronic actuation of the brake. Before pressing the manual
release, you must establish the safety of the machine (e.g. protection against falling).
8.5.2.3
Electrical connection
•
Terminal box (standard)
•
Plug connector (optional, not possible in combination with release monitoring)
8.5.2.4
Monitoring
For monitoring the brake system, there are generally two options:
•
Manual monitoring of wear via air gap checks with a feeler gauge
•
Electrical release monitoring in the terminal box with a non-contact and wear-free proximity switch
8.5.2.5
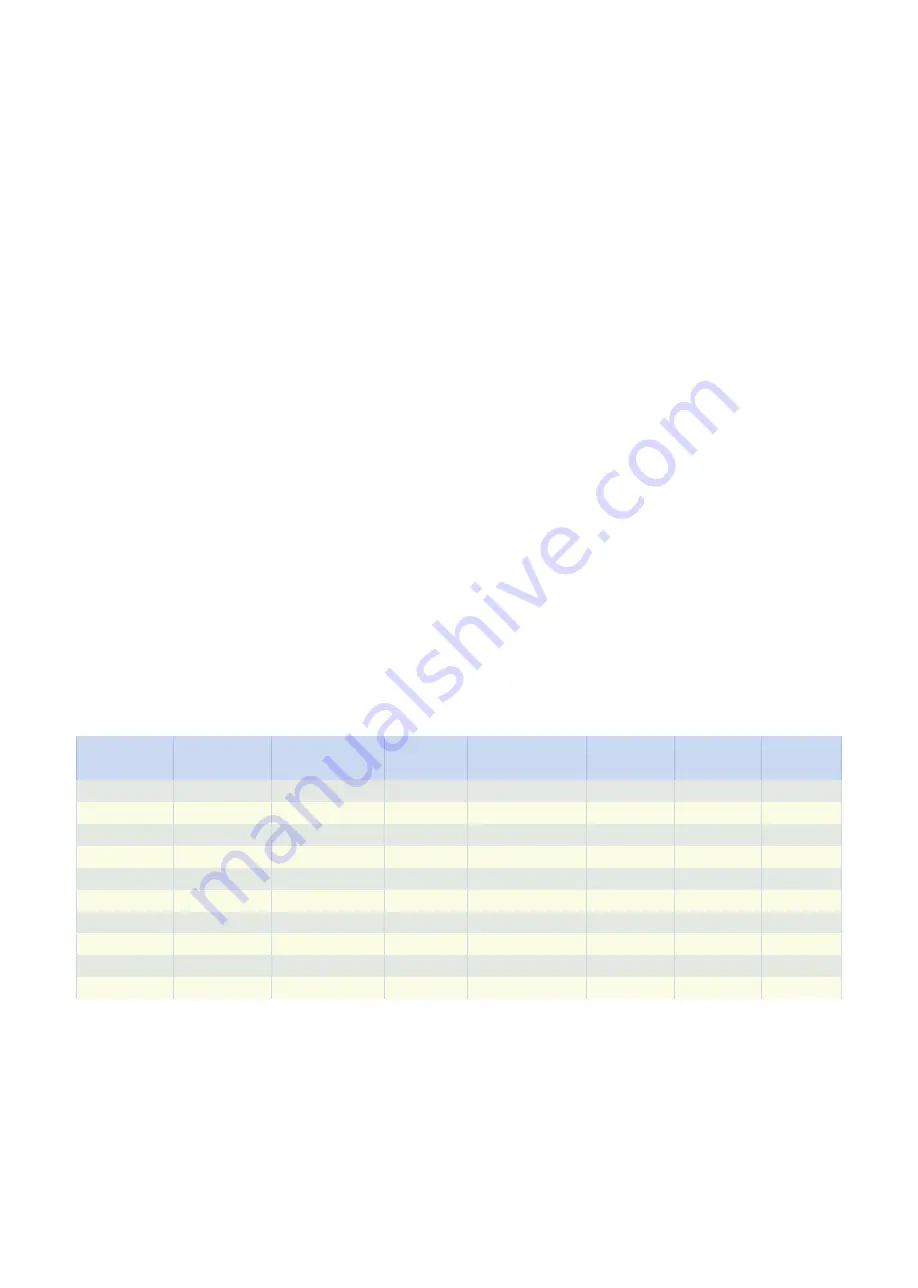
Brake technical data
Technical data for operation at 24 V DC (±10%)
Type
M
1Bstat
J
1
m
Δφ
B
t
1B,DC
t
2B
P
N,B
[Nm]
[kgcm²]
[kg]
[arcmin]
[ms]
[ms]
[W]
MB23
8.0
6.3
8.5
32.0
65
55
30
MB23
12
6.3
8.5
32.0
55
80
30
MB33
16
26
14
26.0
150
60
37
MB33
24
26
14
26.0
120
85
37
MB33
32
26
14
26.0
95
100
37
MB33
45
26
14
26.0
80
120
37
MB43
50
69
26
19.0
150
100
55
MB43
72
69
26
19.0
120
150
55
MB43
100
69
26
19.0
90
200
55
MB53
200
236
61
17.0
200
250
86
Δφ
B
: With the brake closed, a higher total backlash results (Δφ
tot
= Δφ
2
+ Δφ
B
/ i).
8 PHK right-angle planetary geared motors
8.5 Product description
245
Summary of Contents for EZ
Page 1: ...Synchronous servo geared motors with redundant brake ...
Page 2: ......
Page 3: ...Synchronous servo geared motors with redundant brake ...
Page 12: ...1 Selection tool 1 3 Synchronous servo motors 12 ...
Page 20: ...2 2 Selection tables 2 P planetary geared motors 20 ...
Page 40: ...2 7 Additional documentation 2 P planetary geared motors 40 ...
Page 46: ...3 2 Selection tables 3 PH planetary geared motors 46 ...
Page 84: ...4 7 Additional documentation 4 PHQ planetary geared motors 84 ...
Page 110: ...5 2 Selection tables 5 C helical geared motors 110 ...
Page 136: ...5 7 Additional documentation 5 C helical geared motors 136 ...
Page 184: ...6 7 Additional documentation 6 F offset helical geared motors 184 ...
Page 200: ...7 2 Selection tables 7 PK right angle planetary geared motors 200 ...
Page 222: ...7 7 Additional documentation 7 PK right angle planetary geared motors 222 ...
Page 238: ...8 2 Selection tables 8 PHK right angle planetary geared motors 238 ...
Page 258: ...8 7 Additional documentation 8 PHK right angle planetary geared motors 258 ...
Page 276: ...9 2 Selection tables 9 PHQK right angle planetary geared motors 276 ...
Page 298: ...9 7 Additional documentation 9 PHQK right angle planetary geared motors 298 ...
Page 374: ...10 7 Additional documentation 10 K helical bevel geared motors 374 ...
Page 416: ...11 8 Further information 11 EZ synchronous servo motors 416 ...
Page 448: ...448 ...
Page 456: ...15 3 Sales terms and delivery conditions 15 Appendix 456 ...
Page 457: ......
Page 458: ......
Page 459: ......





















































