
















SMAC
LAC-26 Technical Reference Manual
4/29/2013 83
For example, the motor velocity can be limited by giving a value to the Motor Over Speed selection in
DriveWare. An "event action", such as "Disable the Power Bridge", can also be assigned for DriveWare to
take if the motor reaches this speed. If the motor does happen to reach this velocity limit, DriveWare will
automatically cut power to the drive’s output in this particular case, and the drive will be disabled. In the
Drive Status window, "Motor Over Speed" will be shown as a "history" event, and "Commanded Disable" will
be shown as an "Action" event.
Depending on each specific system and application, there are many different options available for assigning
system limits and associated actions. See the DriveWare Software Guide for more information.
B.1.2 Connection Problems
Connection problems are oftentimes caused by incorrect communication settings in DriveWare. The default
factory setting for DZ drives is a Drive Address of 63 and 115200 Baud Rate. When connecting to the drive
with DriveWare for the first time, these default factory settings will have to be used along with the
appropriate serial port being used with the PC. Once the connection has been established, the Drive
Address and Baud Rate may be changed. Check all communications settings to be sure that the Drive
Address, Baud Rate, and serial port are correct. If unable to determine the appropriate settings, the Auto
Detect routine will automatically scan for serial port and Baud Rate settings.
Faulty connection cables are also a possible cause of connection problems. Check all cables for any shorts
or intermittent connections.
For network communication over CAN or RS-485, the DZ drive must be configured for the appropriate
communication protocol. See “RS-485 Selection Jumper” on page 43 for more information.
B.1.3 Overload
Verify that the minimum inductance requirement is met. If the inductance is too low it could appear like a
short circuit to the drive and thus it might cause the short circuit fault to trip. Excessive heating of the drive
and motor is also characteristic of the minimum inductance requirement not being met. See drive data
sheets for minimum inductance requirements.
B.1.4 Current Limiting
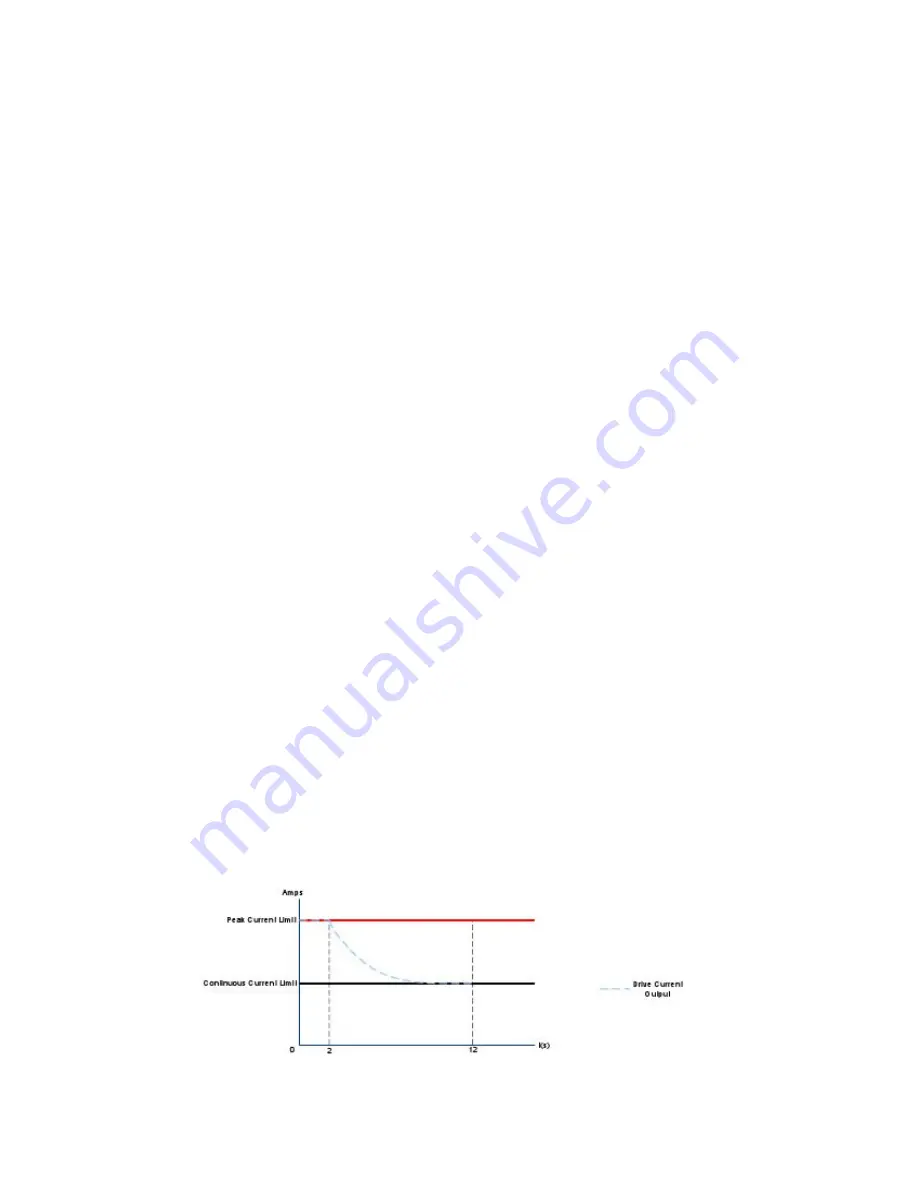
All drives incorporate a “fold-back” circuit for protection against over -current. This “fold-back” circuit uses an
approximate “I2t” algorithm to protect the drive. All drives can run at peak current for a maximum of 2
second (each direction) . Currents below this peak current but above the continuous current can be
sustained for a longer time period, and the drive will automatically fold back at an approximate rate of "I2t" to
the continuous current limit within a time frame of less than 10 seconds. An over-current condition will not
cause the drive to become disabled unless configured to do so in DriveWare.
FIGURE B.1 Peak Current Fold-Back







































































