





























SMAC
LAC-26 Technical Reference Manual
4/29/2013 16
Command:
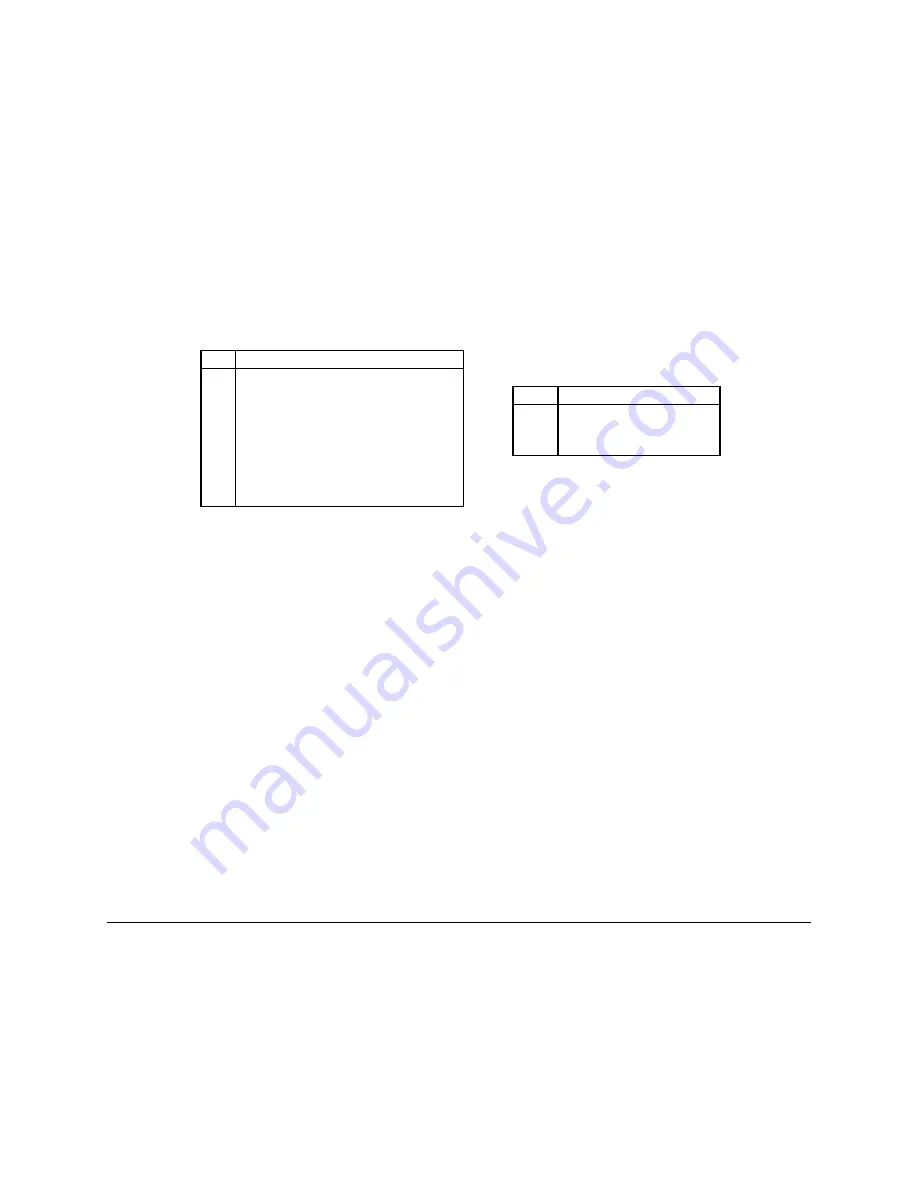
aOMn
-- Output Mode --
Argument:
0 <= n <= 255
Default:
0
This command allows the user to determine what data gets sent to the D/A analog
output
for a given axis. The upper four bits of the argument are for redirection of data and
determine from
which axis the D/A channel will get it’s data
. This allows both D/A channels to output data from
the
same axis. If no redirection is specified, the default data used is that of the current axis.
Note:
When outputting the servo output command,
if no redirection is specified,
then the output
command as phase adjusted by the PH command will be output. If redirection
is specified,
then the normalized data as reported by the TQ command will be output.
‘n’
Value Output
0
Servo Output Command
1
Servo Following Error
‘n+’
Redirect Channel
2
Servo Following Error * 64
0
Default
3
Variable USER1
16
1
4
Low Bits of Encoder Position
32
2
5
Reserved
6
Reserved
7
Reserved
Examples:
1OM0
; Send axis 1 servo output command to D/A channel 1.
1OM16
; Send axis 1 servo output command to D/A channel 1.
2OM0
; Send axis 2
servo output command to D/A channel 2.
2OM32
; Send axis 2
servo output command to D/A channel 2.
1OM0
; Send axis 1
servo output command to D/A channel 1.
2OM17
; Send axis 1
following error to D/A channel 2.
Command:
aOOn -- Output Offset --
Argument:
-32767 <= n <= 32767
Default:
0
This command allows the user to set a continuous output for servo axis ‘a’. In certain
applications, such as an overhanging load, there will be a continuous burden placed upon a servo axis. In
cases like these, where there is a predictable load, the OO command can be used to provide a
continuous restoring force that will be combined with the output of the PID digital filter. This has the affect
of improving the performance of the PID digital filter in that because it is not saturated with static load, it
has a better dynamic response to load disturbances.
Related Commands: FA, FV, OM







































































