





























SMAC
LAC-26 Technical Reference Manual
4/29/2013 66
Yes youFor more information on using Hall Sensors for trapezoidal commutation, see “Trapezoidal
Commutation” on page 74.
Note
Users designing their own PCB interface may also design the appropriate circuitry on their PCB interface to
allow differential inputs
5.2.8 Encoder Feedback
DZ drives can utilize differential encoder inputs for velocity or position control, with the option of also using
the encoder to commutate the motor. The encoder provides incremental position feedback that can be
extrapolated into very precise velocity or position information. With an Encoder being used as the feedback
element, the input command controls the motor velocity or motor position, with the frequency of the
encoder signal closing either the velocity or position loop. The encoder signals are read as "pulses" that
the DZ drive uses to essentially keep track of the motor’s speed, position and direction of rotation. Based
on the speed and order in which these pulses are received from the encoder, the drive can interpret the
motor velocity and physical location. The actual motor speed and physical location can be monitored in
DriveWare through the digital oscilloscope function. Both the "A" and "B" channels of the encoder are
required for operation. DZ drives also accept an optional differential "index" channel that can be used for
absolute position reference.
The MC1XDZ_02 mounting cards provide the option of using single-ended encoder inputs. Users
designing their own PCB interface may also design the appropriate circuitry on their PCB interface to allow
single-ended inputs.
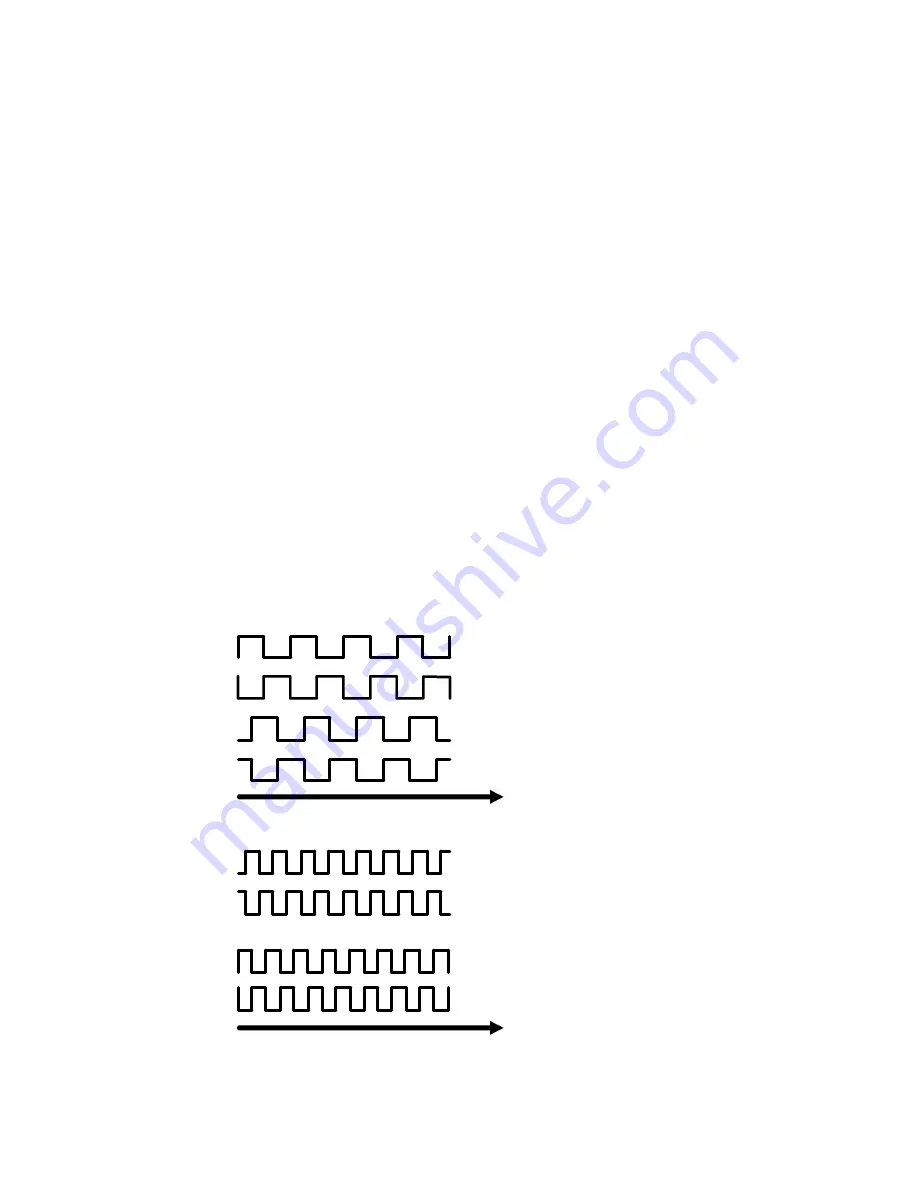
Figure 2.2 below represents differential encoder "pulse" signals, showing how dependent on which signal
is read first and at what frequency the "pulses" arrive, the speed and direction of the motor shaft can be
extrapolated. By keeping track of the number of encoder "pulses" with
FIGURE 2.2
Encoder Feedback Signals
Example 1: Enco der-A pre cedes E ncoder- B. The puls es
arr ive at a c ertain frequ ency, p rov iding speed a nd
di rectiona l information to the dri ve.
Exa mp le 2: Encode r-B prece des E nco der- A, mean ing the
di re ction is oppo site from Exam pl e 1. Th e s igna l frequ ency
is als o hig her, meaning th e s peed is greater tha n i n
Exa mp le 1.
Encoder A+
Encoder A-
Encoder B+
Encoder B-
Encoder A+
Encoder A-
Encoder B+
Encoder B-







































































