






















SMAC
LAC-26 Technical Reference Manual
4/29/2013 77
Appendix 1. Specification
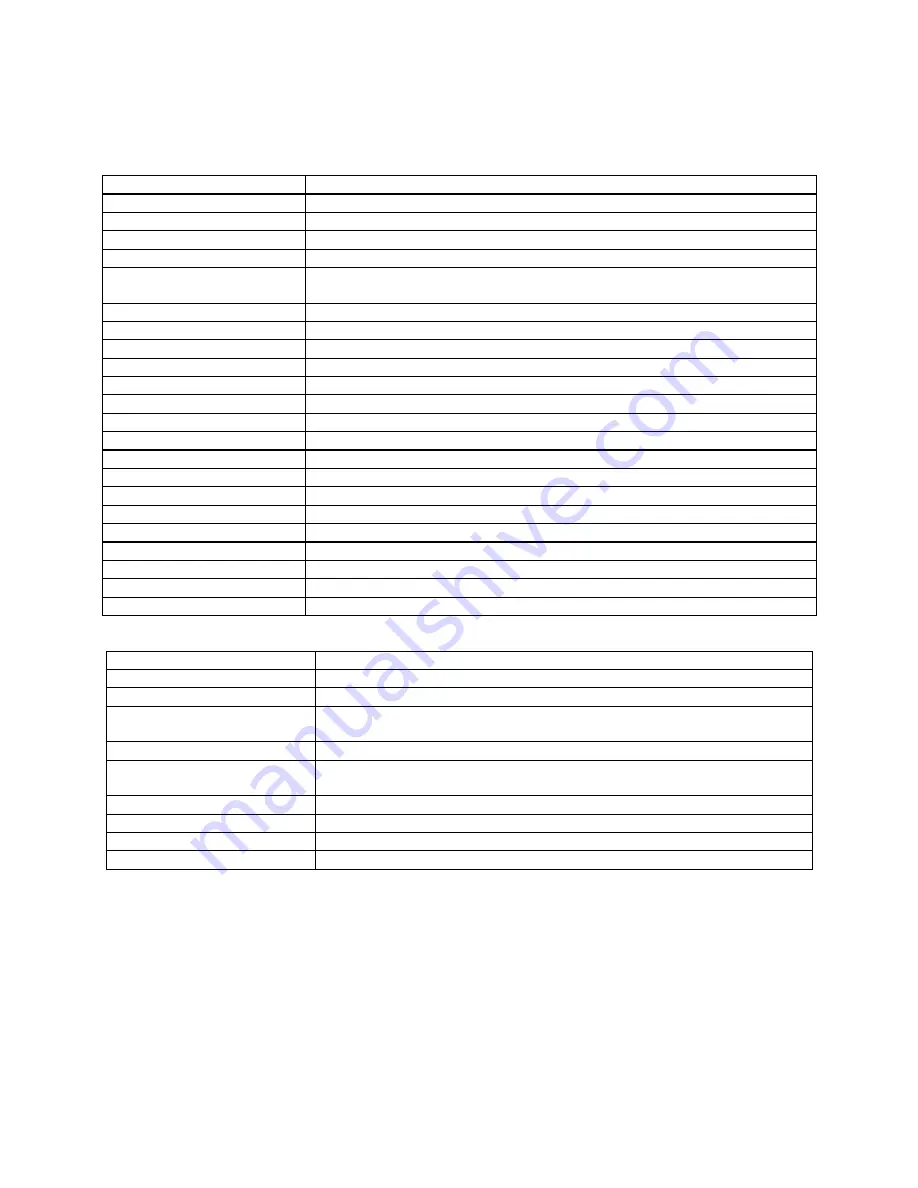
Description
Stand-Alone 2 Axis Servo Motor Controller / Driver
Operating Modes
Position, Velocity, Torque, Electronic Gearing
Control Algorithm
PID
Max. Servo Loop Rate
100 µS per enabled axis
Servo Position Feedback
Incremental Encoder with Index
Output (Standard)
PWM Motor Drive, Single Phase (brushed), 3 Amps Cont. and 6 Amps Peak at
50 VDC Max.
PWM Frequency
Approximately 19.531 KHz
Encoder and Index Input
5V Single-ended or Differential
Encoder Supply Voltage
5 VDC
Encoder Count Rate
2 Million Quadrature Counts per Second
Position Range
32 Bits
Velocity Range
32 Bits
Acceleration Range
32 Bits
General Purpose Digital I/O
3 Optoisolated inputs, 2 Optoisolated outputs
Dedicated Digital Inputs
Limit+, Limit-, Home and Fault, for each axis
Analog Inputs
5 Channels With 10-Bit Resolution, 3 are user accessible
Analog Output2
1 Channels, with 12-bits Resolution, ±10 VDC
Expansion I/O
Optional Expansion to 64 I/O
Communication Interface
RS-232
Supply Voltage
+11 To +50 VDC
Motor Voltage
+12 To +48 VDC
Dimensions
226mm Long by 88mm wide by 73mm Thick
Weight
Approximately 1.2 Kg
2nd Axis Driver Specification
Description
DigiFlex Servo Drive
Operation Mode
Current Loop(50 us), Velocity Loop(100 us), Position Loop(100 us)
Command Source
±10 V Analog, 5V Step and Direction, Encoder Following, PWM and Direction
Feed Back Support
Incremental Encoder (Max 20 MHz Quadrature), Halls, ±10VDC Position, Aux
Incremental Encoder
Commutation Methods
Sinusodal, Trapezoidal
Output (Motor Supported)
Single Phase Brushed, Voice Coil, Inductive Load ;
Three Phase (Brushless); 12A peak, 6A Continuous current
Communication Interface
RS-232, RS-485
Supply Voltage
+20 To +80 VDC
Logic Supply Voltage
5 VDC
Option
1
st
axis Configured







































































