Operating Instructions
NAV350
Product description
8013889/ZML0/2017-06-09
© SICK AG · Germany · All rights reserved · Subject to change without notice
23
Chapter
3
Important
In particular on the usage of the NAV350 for the output of measured values, it is necessary
for a reliable measurement that the beam is incident on the object several times.
3.6
Landmark detection
In the
LANDMARK
DETECTION
operating mode the NAV350 generates an image of its current
reflector environment in one revolution of the scanner head.
The 40 most dense reflectors from up to 250 measured reflectors are taken into account
for positioning to limit the output size. These can be output by means of a telegram. The
NAV350 calculates the exact position from the next four to eight reflectors in an asymmetric
arrangement. (see
fig. 24 on page 40
) The reflectors are selected adaptively.
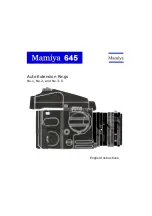
Fig. 9:
Landmark detection
This mode enables the AGV’s vehicle computer to directly access in real-time the landmark
coordinates (reflectors) measured by the NAV350. The data from this direct access can be
evaluated by the vehicle computer with the aid of specific algorithms to calculate the vehicle
position. This may be performed using data from other sensors, e.g., encoders.
x = 1000
y = 2500
= 70°
a