12
NAV-LOC data sheet
8021386/12G4 /2019-04-24 | SICK
OPERATING INSTRUCTIONS | NAV-LOC
59
Subject to change without notice
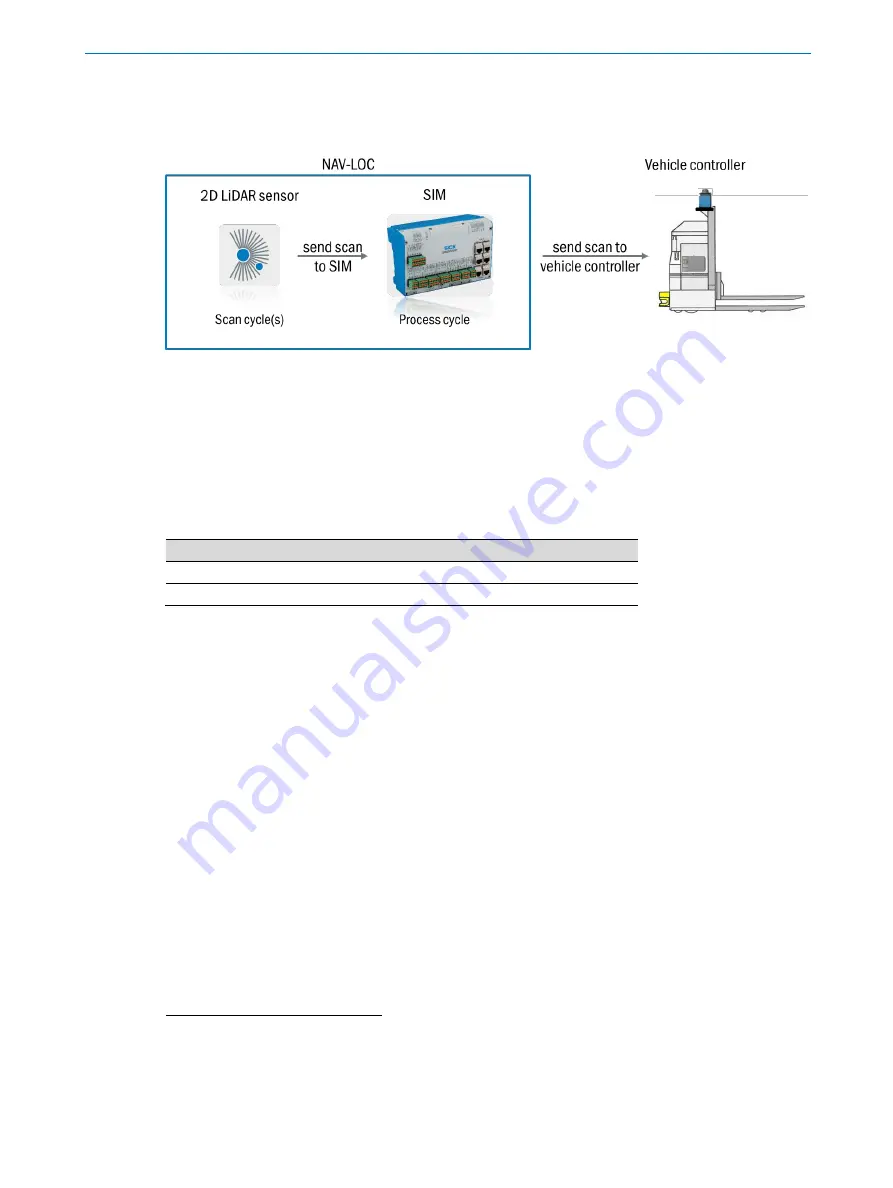
12.2
System latencies
The latencies described in the table below can be eliminated by the synchronization options described
in chapter 8. The remaining uncertainty for this synchronization between the 2D LiDAR sensor and the
SIM is with:
Digital I/O synchronization < 5 ms
23
and with
Network (wired) synchronization < 10 ms.
2D LiDAR sensor
Maximum latency after „start of scan“
24
NAV245
typ. below 170 ms + network transfer time
25
NAV310:
typ. below 260 ms + network transfer time
23
This value is reached only if one uses the additional digital synchronization port of the NAV310 and
NAV245. If not used or for all other 2D LiDAR sensors, the value for “Network (wired) synchronization”
holds true.
24
Despite the latency, the update rate keeps after initialization the rate specified in chapter 12.1.
25
The network transfer time is depending on the system setup.