

















8014493/ YDB5/2014-11-25
© SICK AG · Germany · All rights reserved · Subject to change without notice
Page 3 of 26
1 Introduction
This document describes how data is received and transmitted via CAN. Addressed
systems are LD-MRS400001S0, LD-MRS400102S01 and LD-MRS800000S01.
This document is based on firmware version
3.02
.
Note: The standard LD-MRSXXX (withou
t “S01”) also has a CAN interface. This interface
is used to control the external I/O-extender of the sensor and uses other commands.
This document does not apply to this sensor type!
2 General information
2.1 CAN frame format
The LD-MRS uses CAN 2.0A with 11-bit identifiers. The baudrate is 500 kBit/s.
2.2 Identifiers
Each CAN messages has an identifier (ID). For the LD-MRS, a base ID can be set as a
parameter (default is 0x500). This base ID defines a range of 16 subsequent IDs, starting
with the base ID itself. E.g., with the base ID set to 0x500, the used CAN messages will
have the IDs 0x500 through 0x50F.
As the message ID defines the message and its contents, each ID may only be used by
one device (or for one purpose) on the CAN bus. If multiple sensors should be used on
one CAN bus, each sensor must have a base ID that separates its ID range from the
other devices.
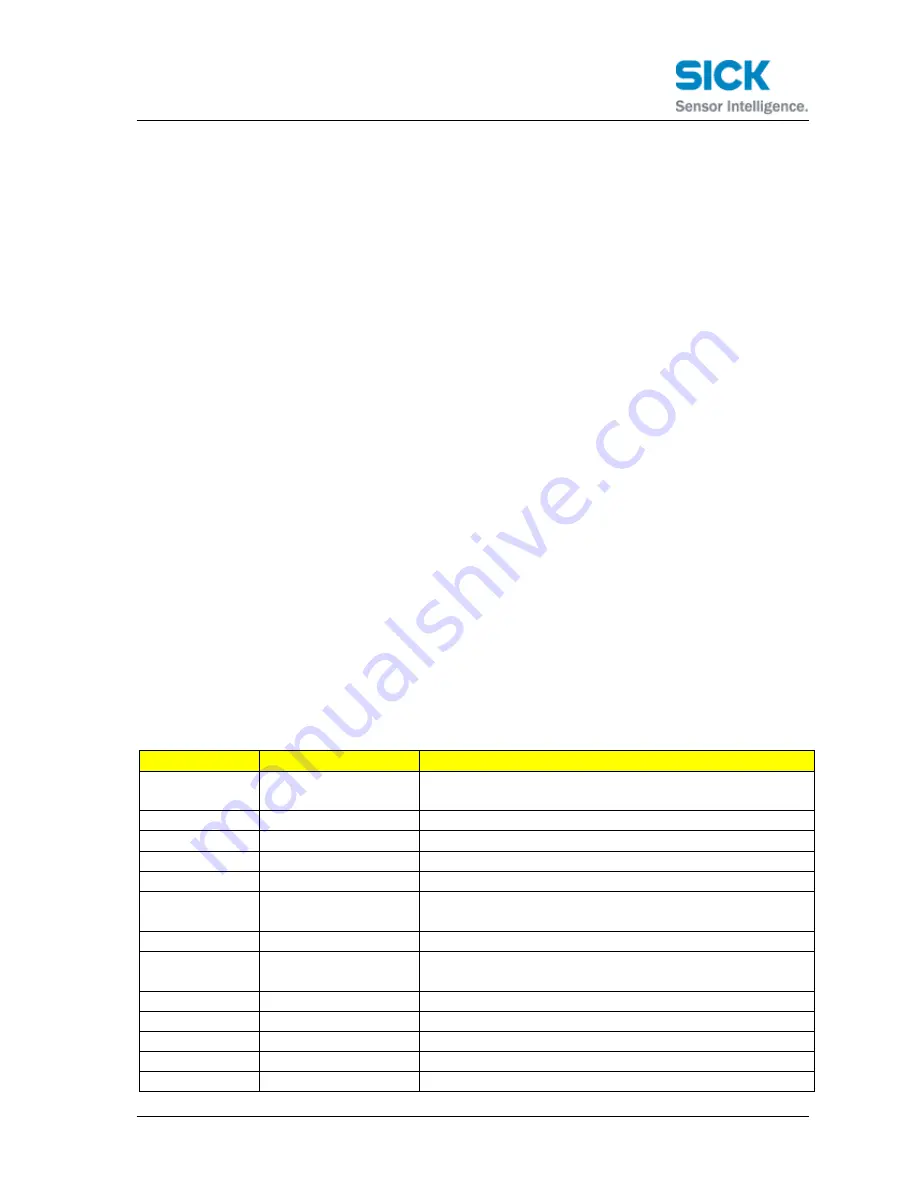
Table 1: CAN ID overview
CAN ID
Default ID
Description
0x303
–
0x306
(fixed)
Vehicle motion data
base ID
0x500
Object list header (start of object data)
base ID+1
0x501
Object timestamp
base ID+2
0x502
Tracking1: First set of information for an object
base ID+3
0x503
Tracking2: Second set of information for an object
base ID+4
0x504
Class and box1: Bounding box information for an
object
base ID+5
0x505
Box2: Bounding box information for an object
base ID+6
0x506
Contour header: Start of contour information for an
object
base ID+7
0x507
Contour points: Additional contour points.
base ID+8
0x508
Object list trailer
base ID+9
0x509
(unused)
base ID+10
0x50A
Command to the sensor.
base ID+11
0x50B
Reply from the sensor (for each received







































































