




























Technical data
06.00 | NSR-A | Assembly and Operating Manual | en | 389722
19
3.2 Calculation of permissible transport load
The pallet changing system is limited to a maximum permissible
torque at the coupling interface. The dynamic load when using the
robot system for handling results in acceleration and deceleration
forces that have to be taken into consideration for the transport
load.
To operate the pallet changing system for dynamic handling, it is
essential for the maximum acceleration of the machine to be
known.
The acceleration has an effect even in the case of an abrupt
deceleration e. g. when the emergency stop switch is actuated.
Inclusion of the acceleration values is of crucial importance for
the operational safety of the pallet changing system and the
entire robot and palletizing system. If it is not taken into account,
it can result in accidents and damage to the whole system.
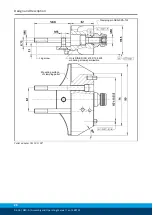
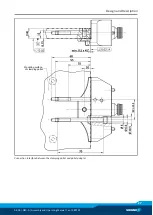
3.2.1 Determining the permissible transport load with NSR-A 100
Missing information or specifications can be requested from the
manufacturer.
Maximum permissible torque for NSR-A 100:
M
xy
= 75 Nm
Legend
M
Torque
Nm
F
Force
N
I
Effective lever length from the coupling interface between the
changeover head and pallet adapter to the center of gravity of the load.
m
m
Mass
kg
g
Acceleration due to gravity
m / s
2
m
total
m
pallet adapter
+ m
clamping pallet
+ m
transport load
kg
a
Maximum acceleration of robot arm
m / s
2







































































