





























Start-up
Interrogating secondary commands for the "C" or "S" commands
The data type reported by the interrogation commands "C" or "S"
can be adjusted using secondary commands or specifiers. This
feature is useful for users who want to develop their own program
to save the data in an external file or display the data in
illustrations such as charts. If an "S" or "C" command is issued
without a specifier, the specifier of the previous "S" or "C"
command is used for the data printout. The default specifier at
power-up is "FXYZTXYZ".
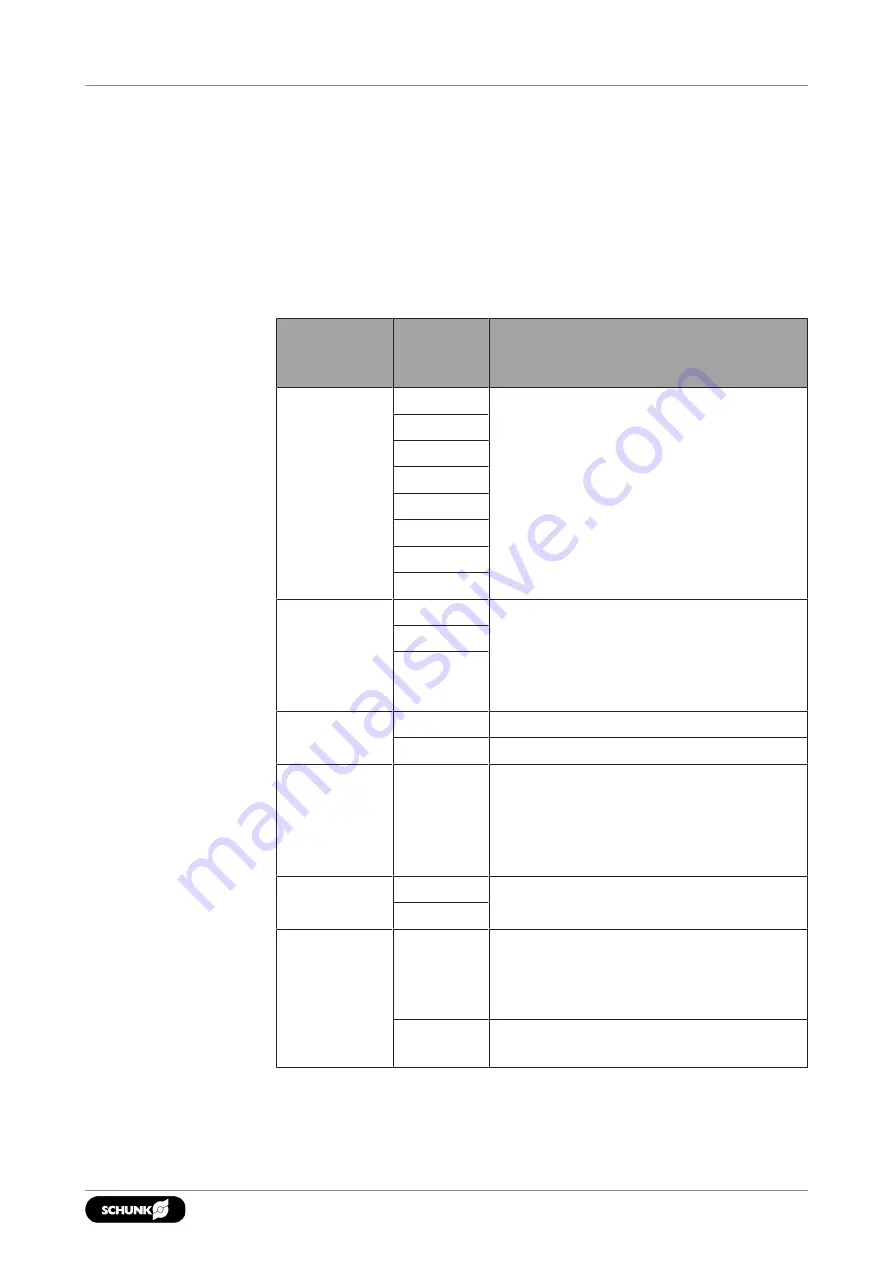
Category
Secondary
command
or specifier
Notes
Gage
number(s)
0
The measured values are printed only
in counts.
All test mean values as well as just one
test mean value can be specified.
1
2
3
4
5
6
7
Axis
X
The user can choose to display force
and torque data in the x, y or z axis.
The output value can be displayed in
force and torque numbers or technical
units.
Y
Z
Force and/or
Torque
F
The XYZM force data is displayed.
T
The XYZM torque data is displayed.
Magnitude
M
Force or torque data is displayed as the
magnitude of the vector components
on the x, y and z axes. The output value
can be displayed in force and torque
numbers or technical units.
Counts or
Units
C
The XYZM data is displayed in counts or
the selected user units.
U
Numeric
System
H
The data is displayed as a hexadecimal
number. All data printed in units is
displayed as decimal numbers by
default.
D
The data is displayed as a decimal
number.
21
01.00 | FTR-AXIA | Commissioning instructions | en | 1517835
Summary of Contents for FTR-AXIA
Page 39: ......







































































