





















Operating Manual 90° ACTUSAFE CMF(S)QT
OM-ENGLISH-Failsafe-QT-16xx-V2.00-2022.03.01
7 Parameter menu
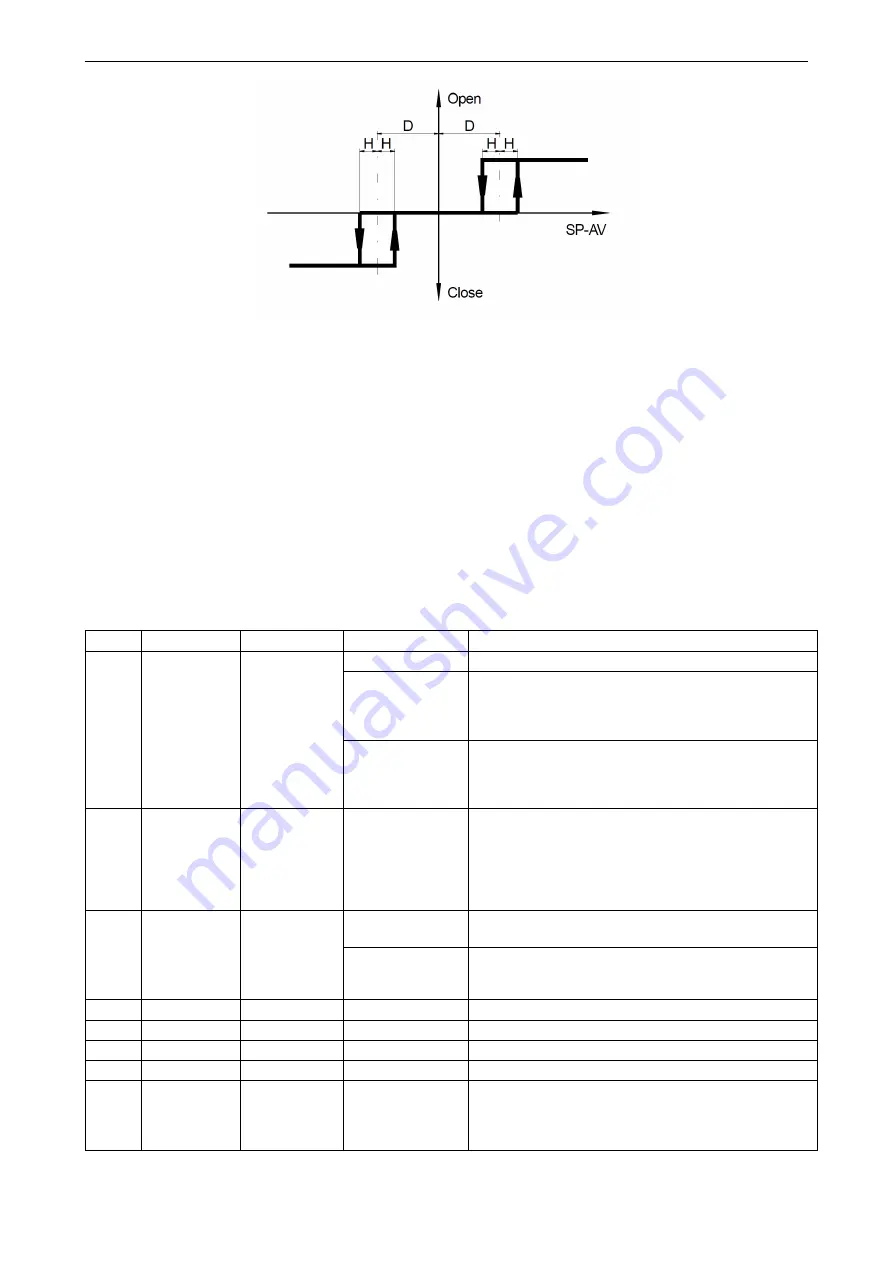
Figure 73:
Function principle of the dead band, and hysteresis in conjunction with the positioner
The figure above shows the working principle of the parameters "P13.4 - Dead Band" and "P13.16 - Hysteresis". The set
dead band thresholds are added and subtracted from the setpoint. The hysteresis sets the threshold on the deadband
thresholds. E.g. if the setpoint is 50%, dead band is 1% and hysteresis is 50%, the dead band thresholds will be at 49%
and 51%. On top of that, the hysteresis for the 49% threshold will be at 50% of the dead band value, which is
±
0.5%;
thus the hysteresis on the 49% dead band threshold is at 48.5% and 49.5%. The actuator will move toward 50%, if the
actual position is below 48.5% and stop, if the actual position is between 49.5% and the "outer" hysteresis mirrored on the
ordinate, which is 51.5% in this case.
NOTE:
Please be aware, that a 100% setting for hysteresis will cause oscillation due to overlapping thresholds.
7.13
Parameter group: PID controller (optional)
The optional PID controller is used for controlling an external actual value (process variable) to a setpoint using 0/4-20 mA
signal by readjusting the actuator.
Menu item
Sub-menu item
poss. setting
Notes / comments
P14.1
PID-controller
Function
0: disabled
PID controller disabled
1: Position
The output of the PID controller corresponds to the
position setpoint of the actuator. The positioning (tracking
of the actual position to the setpoint) is done by the
positioner (see 7.12).
2: Speed
The output of the PID controller corresponds to the
change of the position setpoint (speed) of the actuator.
The positioning (tracking of the actual position to the
setpoint) is done by the positioner (see 7.12).
2: Position Change
The output of the PID controller corresponds to the
change of the position setpoint (speed) of the actuator.
The positioning (tracking of the actual position to the
setpoint) is done by the positioner (see 7.12). Hence a
control mode similar to the speed mode (see setting 2
above) is possible also for actuators with constant speed.
P14.2
PID-controller
External
Setpoint
0: fixed
The PID controller uses an internal, fixed setpoint (see
param P14.3).
1: external
The PID controller uses the external setpoint. The
adjustment of this setpoint is done with the params P13.2
and P13.3 (see 7.12).
P14.3
PID-controller
Fixed setpoint
0. . . 100%
Specification of the internal fixed setpoint
P14.4
PID-controller
Start (at 0%)
0. . . 20.5 mA
mA value at 0% of the external actual value
P14.5
PID-controller
End (at 100%)
0. . . 20.5 mA
mA value at 100% of the external actual value
P14.6
PID-controller
Gain (P)
-50.0. . . +50.0
Gain (proportional value) of the PID-controller
P14.7
PID-controller
Reset time (I)
0. . . 100.0 s
The shorter the reset time (integral time, integral value),
the stronger is the effect of the integral component of the
PID-controller. Values below 1.0 will disable the integral
component.
continued on next page
61