



























Operating Manual 90° ACTUSAFE CMF(S)QT
OM-ENGLISH-Failsafe-QT-16xx-V2.00-2022.03.01
7 Parameter menu
7.9
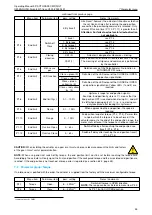
Parameter group: Binary outputs
The controller is equipped with 8 freely configurable binary outputs. Please find further information on technical data of the
binary outputs in section 20.1, page 81. Provided with external supply, binary outputs are optically isolated from the rest of
the controller.
Default binary outputs are as follows:
Output 1: Ready
Output 2: End position OPEN
Output 3: End position CLOSED
Output 4: Run OPEN
Output 5: Run CLOSED
Output 6: Torque
Output 7: LOCAL
Output 8: REMOTE
Menu item
Sub-menu item
poss. setting
Notes / comments
P10.1
Bin. Output
Output 1
0: No Function
The output has no function.
1: Ready
Actuator is ready
2: Fault
General fault; actuator is not ready
3: Open
Actuator is in open position
4: Closed
Actuator is in closed position
5: Running Open
Actuators runs in direction Open
6: Running Closed
Actuators runs in direction Closed
7: Running
Actuator is running in either Open or Closed direction
8: Torque Open
Switch-off torque was reached in Open direction,
actuator has been switched off
9: Torque Closed
Switch-off torque was reached in Closed direction,
actuator has been switched off
10: Torque
Switch-off torque was reached in either Closed or Open
direction
11: Travel Open
The Open end position has been reached
12: Travel Closed
The Closed end position has been reached
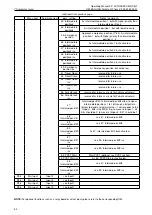
13: Pos. > Int.1
Position > Intermediate position 1
14: Pos. < Int.1
Position < Intermediate position 1
15: Pos. > Int.2
Position > Intermediate position 2
16: Pos. < Int.2
Position < Intermediate position 2
17: Pos. > Int.3
Position > Intermediate position 3
18: Pos. < Int.3
Position < Intermediate position 3
19: Pos. > Int.4
Position > Intermediate position 4
20: Pos. < Int.4
Position < Intermediate position 4
21: Local
Local oerating mode (selector switch in position Local)
22: Remote
Remote operating mode (selector switch in position
Remote)
23: Off
Off operating mode (selector switch in the Off position)
24:
Mot.temp.Warning
The motor temperature is above the warning threshold.
25:
Mot.temp.Switchoff
The motor temperature is above the motor switchoff
threshold.
26: Always
Signal is always on
27: Never
Signal is always off
28: Bin. Input 1
Forwarding of binary input to output
29: Bin. Input 2
Forwarding of binary input to output
30: Bin. Input 3
Forwarding of binary input to output
31: Bin. Input 4
Forwarding of binary input to output
32: Bin. Input 5
Forwarding of binary input to output
33: Torque Open
Masked
As Torque OPEN, but it will supress (mask) this signal in
the end position upon torque-dependent switch-off.
continued on next page
53







































































