





























5-26
s
r
e
ll
o
r
t
n
o
C
e
v
i
r
D
3
0
E
V
I
R
D
O
C
E
6
1
0
-
3
.*
*
C
K
D
3
0
E
V
I
R
D
O
C
E
R1
R3
R2
C1
I
n
Ap5183f1.fh7
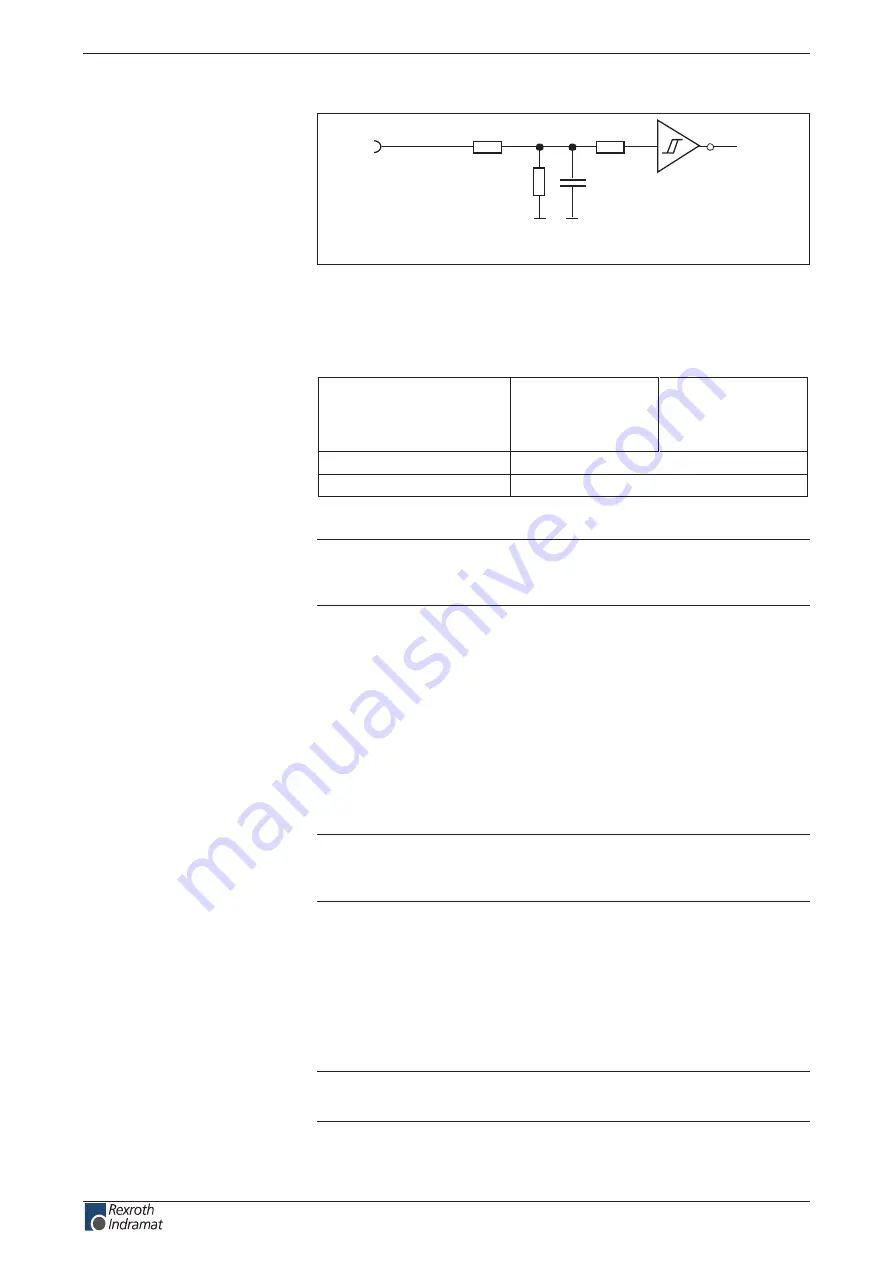
Schematics
R1:
10k
R2:
3k3
R3:
10k
C1:
no data
Fig. 5-39:
Input circuit
Input voltage:
High
Low
min.
16 V
-0,5 V
max.
30 V
3 V
%
5
±
m
h
O
k
3
,
3
1
e
c
n
a
t
s
i
s
e
r
t
u
p
n
I
n
o
it
p
ir
c
s
e
d
e
r
a
w
m
ri
f
l
a
n
o
it
c
n
u
f
e
e
S
e
m
it
n
o
it
c
a
e
R
Fig. 5-40:
Inputs
Note:
If the inputs are controlled by a power supply other than the
DC24 volt supply of the DKC, then the reference lead of the
other power supply must be connected to X3.12 (0 V).
The positive edge of the homing switch is always evaluated.
End switches can be N/C or N/O depending on how the drive is
parametrized. See functional firmware description.
Position and time measurements are read using two binary input signals.
Switching-signal dependent continuous block switching makes transition
to the next block possible with the use of an external switching signal.
Note:
If the functions probe and following block mode are
simultaneously activated, then both functions evaluate the
inputs independently of each other.
At delivery, the E-stop function is deactivated depending on what has
been parameterized. See functional firmware description.
With a positive edge at the input "clear error", all errors (up to four) are
cleared. With the actuation of the S1 button (firmware module) only the
error in the display is cleared and any other errors present are then
shown.
Note:
The errors entered in the back-up memory are not cleared with
the "clear error" input.
Input circuit
Digital inputs:
Inputs
Digital inputs:
Homing switch:
Limit+, Limit-:
Probes:
Cams:
E-Stop:
Clear error:
|
(479) 422-0390
Summary of Contents for BZM 01.3-01-07
Page 343: ......
Page 344: ...Printed in Germany 2 8 0 1 0 7...







































































