





























AP3X Robot User Manual
112 Document Version V1.1.0 (01/11/2023)
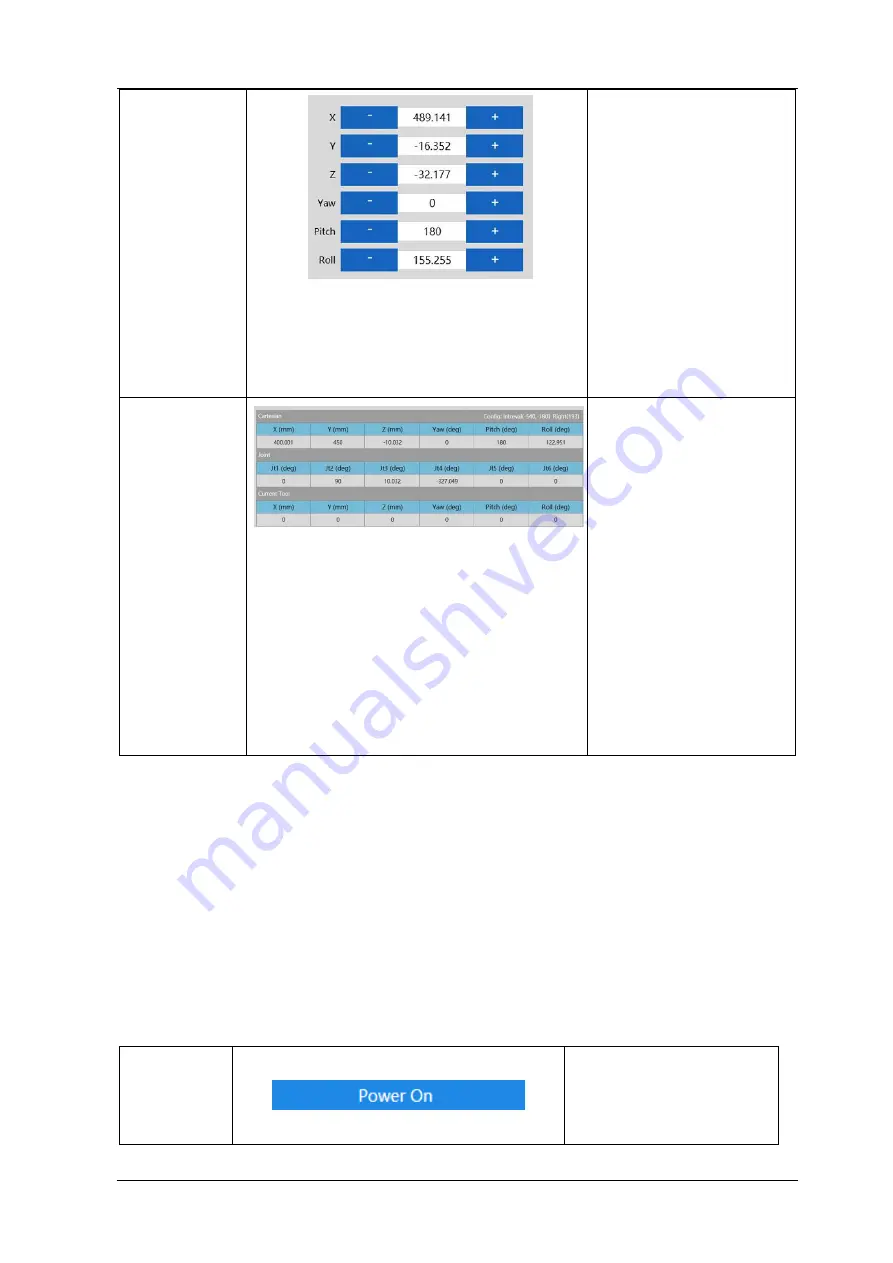
Coordinates in [World/Tool/UseFrame]
mode
jogged.
Jog
coordinate
values
If you need to control
the motion of the robot
separately, you can
click <X +>,<X->,etc. to
control the motion of
the
robot
in
the
direction of X,etc.
7.7
Servo power-on
When controlling the motion of the robot through the ARM programming
environment, you must first power on the robot via servo.
Table 7-3 Introduction to tools on the Servo power-on interface
Power on
Click < power on > to
control the robot to






































































