





























Operation
Atlas
®
Digital Amplifier Complete Technical Reference
51
4
4.5.4
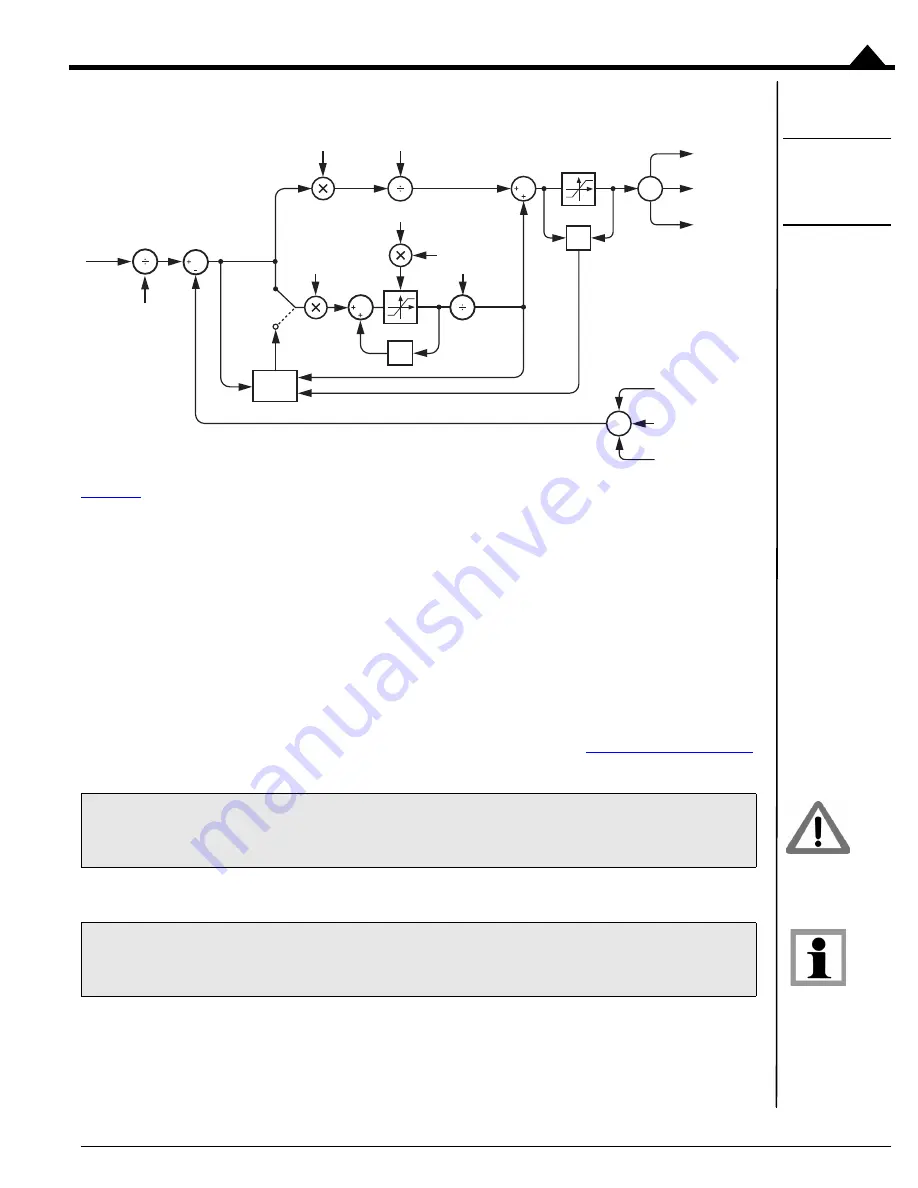
Third Leg Floating Control
Figure 4-8:
Third Leg
Floating
Control
provides an overview of the calculation flow when third leg floating control mode is selected. Compared
to individual phase control or FOC, third leg floating uses a different method in that only two of three legs are driven
at any instant with the third, non-driven, leg floating. The actual driven and non-driven legs continuously change based
on the phase, as does the leg current used as input to the current loop. In this way, as the motor rotates, each motor
leg will go through a sequence of being driven for two cycles and then left floating for one.
To enable third leg floating mode the command
SetCurrentControlMode
is used. The value set using this command
can be read back using
GetCurrentControlMode
.
Other than the method by which the motor phases are driven and the leg current is sensed, third leg floating is similar
to FOC, however with only the q loop calculated. For the q current loop three parameters are set by the user, Kp, Ki,
and Ilimit. Two of these are gain factors for the PI (proportional, integral) controller that comprises the heart of the
third leg floating controller, and the other is a limit for the integral contribution. To set any of these parameters the
command
SetFOC
is used. To read back these parameters the command
GetFOC
is used. The values set using this
command are buffered and may be activated using the update bit of the SPI header. See
for more information on command buffering.
It is the responsibility of the user to determine control parameters that are suitable for use in a given application.
The third leg floating control mode is applicable to Brushless DC motors only.
256
256
< >
Ki
Kp
ILimit
PWM
Limit
64
Command
A Output
q Output
B Output
Sel.
C Output
Leg A Current
Leg B Current
Sel.
Leg C Current
Anti
Windup
Actual Current
2
Z
-1
q Integrator
sum
qReference
qError





















































