





























Operation
Atlas
®
Digital Amplifier Complete Technical Reference
43
4
of 0.0 will ‘wrap’ around to a value of 360.0
°
. Conversely, a position angle that moves past 360.0
°
wraps to a value of
0.0
°
.
To actually send the phase angle to Atlas it is combined with the motor voltage or torque command into a single SPI
command packet. Since the phase angle and torque must be provided at each command update cycle, this provides an
efficient approach for continuously transmitting Brushless DC motion command packets. See
a Voltage or Torque Output Value”
for complete word format and protocol information.
4.4.2
Phasing with Hall Sensors
As the previous section indicates, to control a Brushless DC motor the external controller continuously provides phase
information to Atlas. Typically, the external controller utilizes either Hall sensors or position encoders to determine
this information.
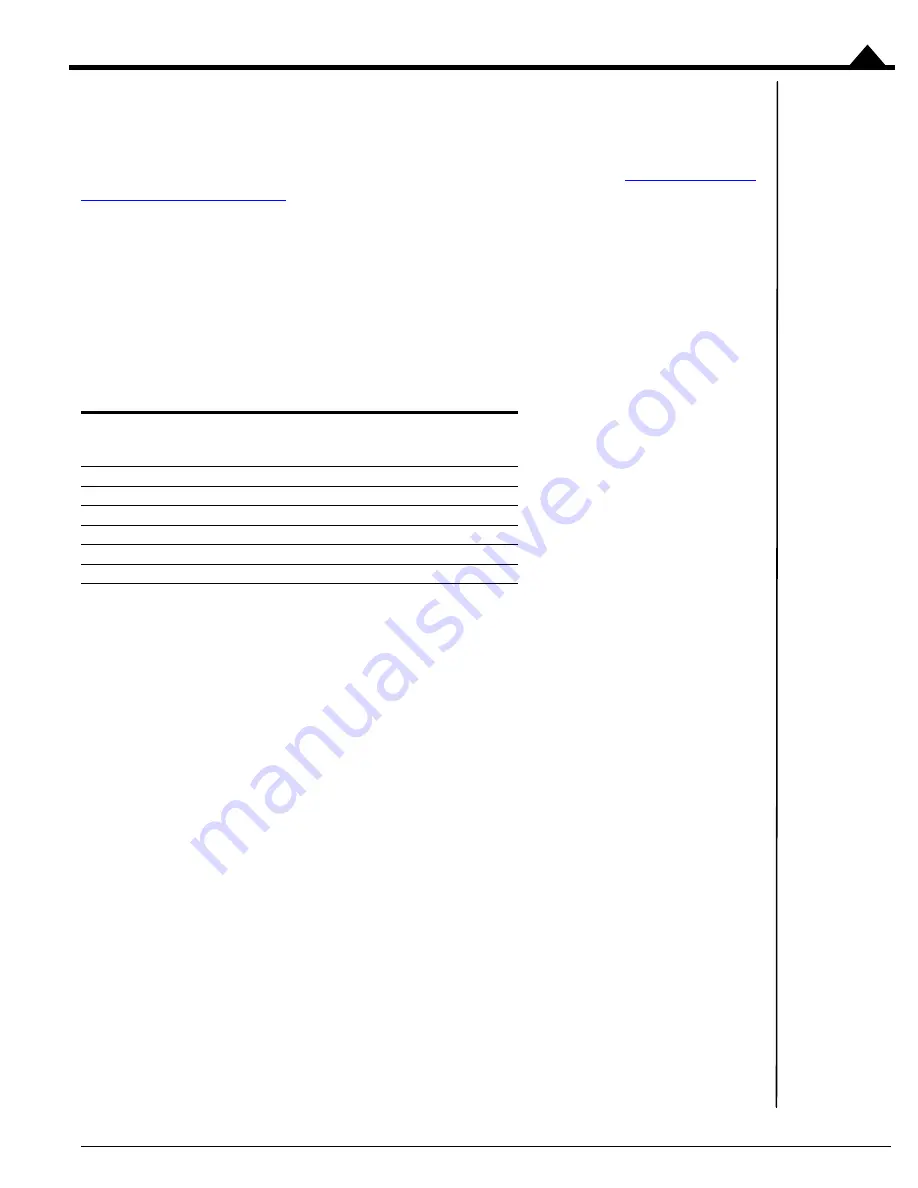
If the external controller directly inputs Halls converting the three incoming hall signal states to a commanded phase
angle is straightforward. The table shows how to convert an instantaneous hall sensor reading for the most common
Hall encoding scheme to an output command phase angle sent to Atlas over the SPI interface.
Hall A
Hall B
Hall C
Phase angle to
send to Atlas
in degrees
12-bit phase
angle word
0
0
1
0°
0
1
0
1
60°
683
1
0
0
120°
1,365
1
1
0
180°
2,048
0
1
0
240°
2,731
0
1
1
300°
3,413





















































