





























Motion Control
Precision MicroControl Corp.
82
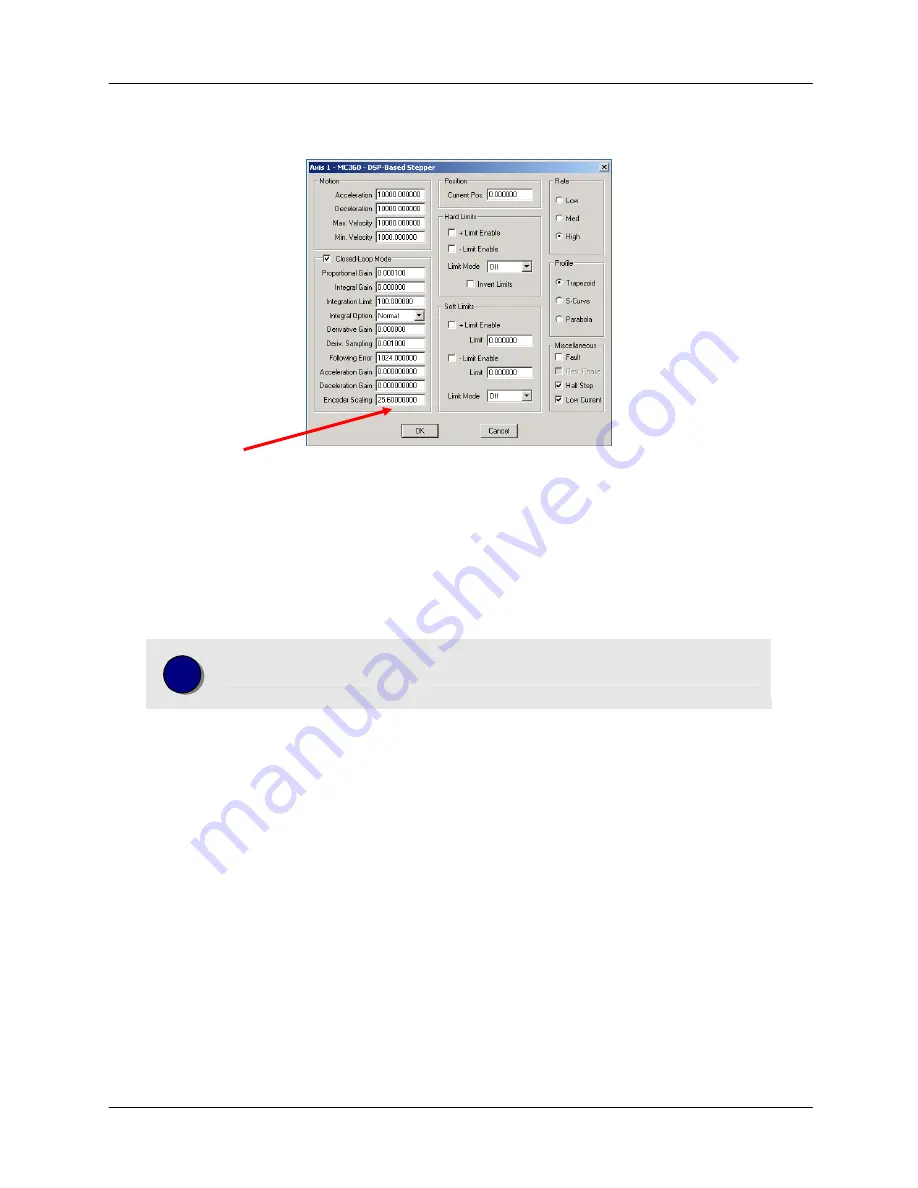
The Encoder Scale can also be defined from the
Stepper Setup
dialog of the
Servo Tuning
or
Motor
Mover
programs.
Figure 33. Enter the closed loop steps / encoder scale
Set the trajectory parameters
As with an open loop stepper, the trajectory parameters (maximum velocity, acceleration, deceleration,
and minimum velocity) must be set prior to commanding motion. These values can be set using the
MCMOTION
data structure or can be entered from the
Stepper Setup
dialog of
Servo Tuning
or
Motor
Mover
.
i
Closed loop stepper trajectory parameters (and move distances) are specified
in
encoder units
, not motor step units.
Tune the axis
When a stepper axis is configured for closed loop operation the default proportional gain is set to 0.0001,
which should be sufficient to move the axis
near
the specified target. Further adjustments of the
proportional and integral gain allow the controller to:
Minimize the following error while moving
Eliminate slow speed slewing of the axis near the end of the move
Settle within 1 encoder count of the target
Use the PMC Servo Tuning program (\Start\Programs\Motion Control\Motion Integrator\Servo Tuning) to
tune the closed loop stepper.
Step 1
- Enter a typical move distance (in encoder counts) and move duration (in milliseconds) using
the
Test Setup
dialog (Setup\Test Setup).
Step 2
- Verify that the Trajectory Generator is on (yellow LED)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com