




























phytron
77
MA 1303-A007 EN
8.4.4 Current Delay Time
After the last control pulse, the stop current is activated after a set time to minimise power
consumption and motor heating. The time after the last control pulse until changing to the
stop current is called Current Delay Time t
DELAY
.
Phytron recommends specifying t
DELAY
so
that the motor’s oscillations are decaying after
the last motor step and positioning is more accurate. The higher current reduces in this
case the decay and incorrect positioning is avoided.
A value of 1 to 1000 ms can be adjusted in 15 stages (see chap.
Fehler! Verweisquelle
konnte nicht gefunden werden.
).
Automatic change from run to stop current:
After the stop current is applied, the ratio between both phase currents remains the same
in the respective current feed pattern. Changing from run to stop current is achieved syn-
chronously.
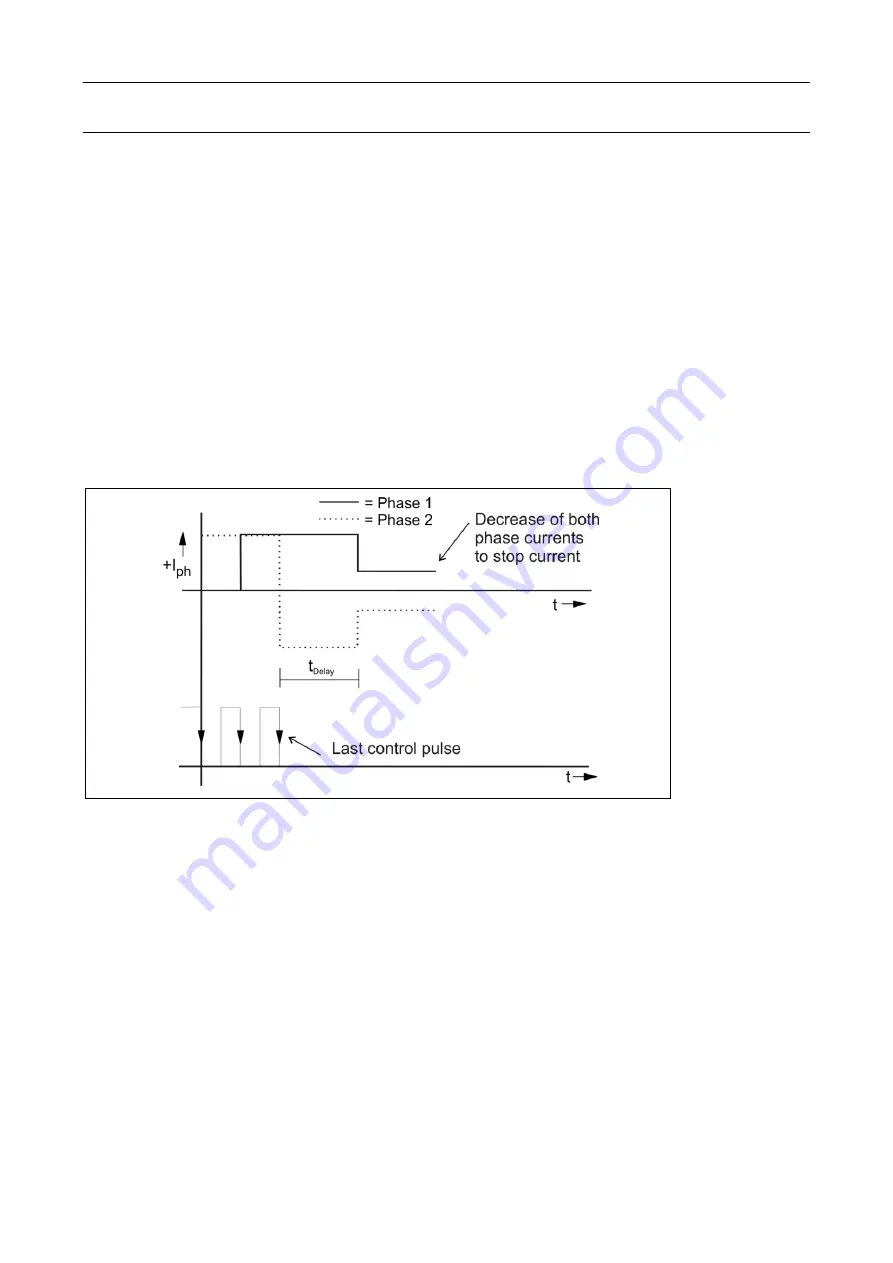
In the following figure, the next motor step follows after every
rising
control pulse edge:
Fig. 23: Decrease to stop current after the last control pulse (full step)
Decreasing to stop current has the following advantages:
Motor and power stage heating and power consumption is reduced.
EMC is further improved due to smaller current values at a standstill.
The Current Delay Time t
DELAY
after the last step of a traversing job has the following ad-
vantages:
The release time of the stepper motor at its target position will be accelerated.
Therefore, the next traversing job can be started quicker.
Step loss, therefore incorrect positioning, by decaying effects on reaching a position
is minimised.







































































