





























6. COMMAND REFERENCE
177
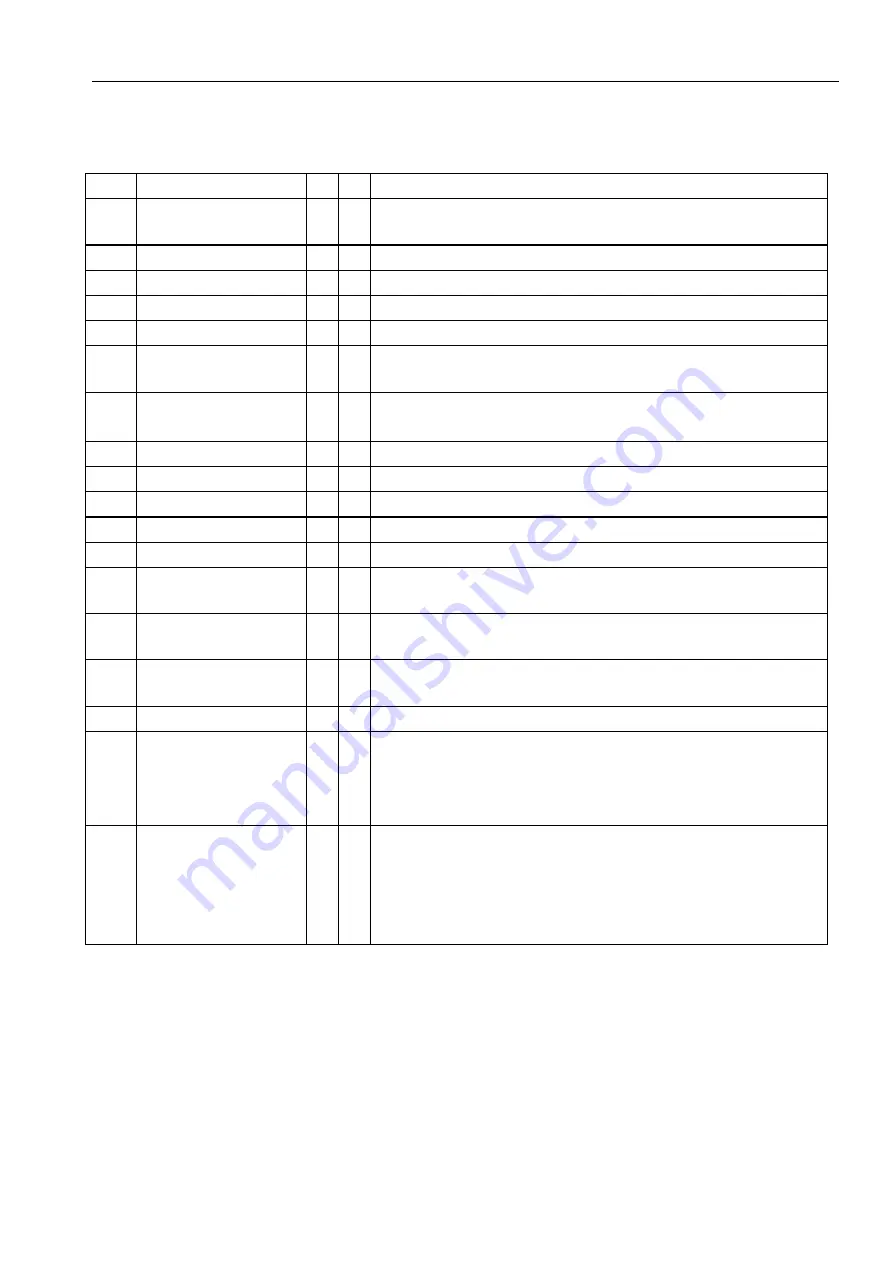
System Variables
Var
Name
R
W
Range/default value
AB
Analogue
Deadband
Y
Y
0 to +255, default = 0
AI
Analogue Input
Y
N
-2047 to +2047
AO
Analogue Offset
Y
Y
-2047 to +2047, default = 0
BR
BAUD rate
Y
Y
9600 or 19200 bits per second (9600 default)
BU
Buffer usage
Y
N
0 to 100% of program buffer used
CQ
Command queuing
Y
Y
1= Pauses until move complete (default)
0= continuous execution
DC
Damping
Configuration
Y
Y
0 = settling time damping OFF (default)
1 = settling time damping ON
DF
Drive Fault status
Y
N
See below:
DF1 Drive Fault status
Y
N
First byte of 32-bit DF variable
DF2 Drive Fault status
Y
N
Second byte of 32-bit DF variable
DF3 Drive Fault status
Y
N
Third byte of 32-bit DF variable
DF4 Drive Fault status
Y
N
Fourth byte of 32-bit DF variable
EI
Encoder Input
Y
Y
0=step/dir, 1=cw/ccw, 2=quad ABZ, de-energise drive
to change
EM
Encoder count per
rev.
Y
Y
1 to 4200000 (default 4000)
EO
Encoder signal
Output
Y
Y
0=step/dir, 1=cw/ccw, 2=quad ABZ, de-energise drive
to change
EQ
Echo Queuing
Y
Y
0=normal, 1=wait for <CR>, 2=cmd response only
ES
Energise Sense
Y
Y
Sets the sense of the external enable/enable_bar
signal
0=low signal to enable
1=high signal to enable
EX
Comms. Response
Style & Echo
Control & Physical
Interface (RS232)
Y
Y
0= speak when spoken to, echo off, default for RS485
1= speak whenever, echo off
2= speak when spoken to, echo on
3= speak whenever, echo on, default for RS232
Summary of Contents for ViX250IM
Page 3: ......
Page 52: ...44 VIX IM MICROSTEPPER INDEXER DRIVE USER GUIDE...
Page 102: ...VIX IM MICROSTEPPER INDEXER DRIVE USER GUIDE 94...
Page 206: ...198 VIX IM MICROSTEPPER INDEXER DRIVE USER GUIDE...
Page 218: ......





















































