



























No. SX-DSV02472 -
133-
9-1 List of parameters
The attribute of a parameter indicates the point at which the modified parameter setting becomes effective.
A : Always effective
B : Do not change while the motor is operating or command is transferred.
Reflection timing of parameter change made during the motor operation or command transfer is not defined.
C : Effective after reset control power
R : Effective after reset control power
NOTE: There is no difference between the C attribute of R is this amp.
X Read only - It cannot be changed using the normal procedure.
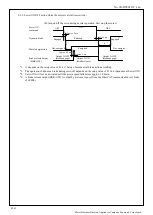
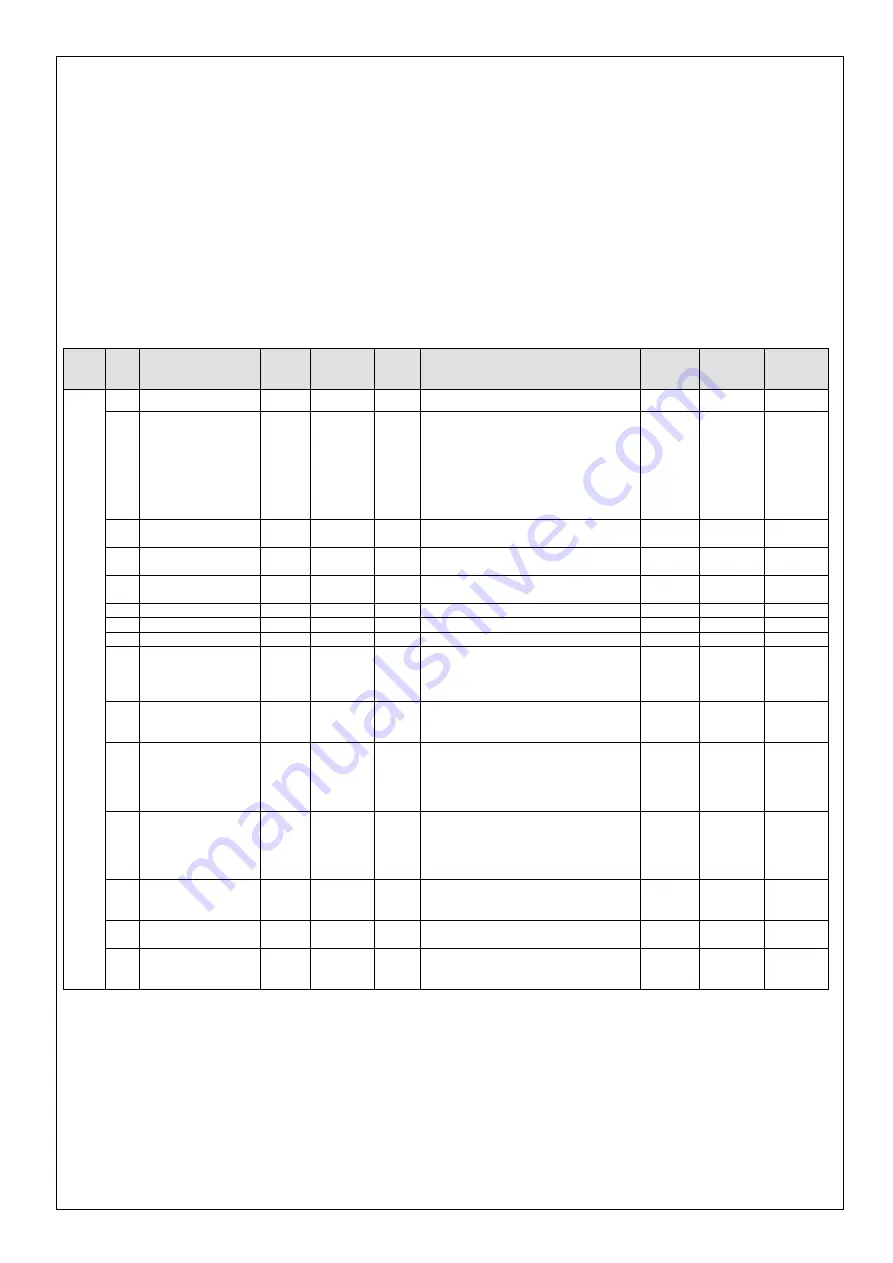
Class 0: Basic setting
Class
No.
Title
Unit
Range
Size
[byte]
Function / Contents
Attribute
Related
control
mode
Reference
0
00
For manufacturer’s use
—
—
2
Permanently set at 1.
—
—
—
01
Control mode setup
—
0–6
2
Select the control mode of the servo driver.
0: semi-closed control
(position/velocity/torque control, selectable)
1
−
5: To be used by the manufacturer but not
by the user.
6: Full-close control (only position control)
(Not supported)
Permanently set at 0.
R
All
—
02
Real-time auto-gain
tuning setup
—
0–6
2
You can set up the action mode of the
real-time auto-gain tuning.
B
All
5-1-1
03
Real-time auto-tuning
machine stiffness setup
—
0–31
2
Set the machine stiffness after tuning
real-time auto-gain.
B
All
5-1-1
04
Inertia ratio
%
0–10000
2
You can set up the ratio of the load inertia
against the rotor (of the motor) inertia.
B
All
—
08
For manufacturer’s use
—
—
4
Permanently set at 0.
—
—
—
09
For manufacturer’s use
—
—
4
Permanently set at 1.
—
—
—
10
For manufacturer’s use
—
—
4
Permanently set at 1.
—
—
—
11
Number of output
pulses per motor
revolution
(Not supported)
pulse/r
1–262144
4
Set A/B phase output counts per motor
revolution.
Permanently set at 2500.
R
All
4-2-5
12
Reversal of pulse
output logic
(Not supported)
—
0–3
2
You can set up the B-phase logic and the
output source of the pulse output.
Permanently set at 0.
R
All
4-2-5
13
1st torque limit
%
0–500
2
You can set up the 1st limit value of the
motor output torque.
The limit of parameter value is determined
by the maximum torque of the motor
connected.
B
All
6-1
7-4
14
Position deviation
excess setup
pulse
0–2
27
4
Set excess range of positional deviation by
the command unit.
Err24.0 (Error detection of position
deviation excess) becomes invalid when it
set up this to 0.
A
Position,
Full-close
7-4
15
Absolute encoder setup
—
0–2
2
You can set up the using method of absolute
encoder
C
Position,
velocity,
torque
4-7-1
16
External regenerative
resistor setup
—
0–3
2
Set up items related to regenerative resistor.
C
All
4-6
17
Selection of load factor
for external
regenerative resistor
—
0–4
2
Select the computation method of loading
factor for external regenerative resistor.
C
All
4-6
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation







































































