




























No. SX-DSV02472 -
94-
6-3-2 Sequence at Servo-Off
Operation sequence of the servo-off state is set by 605Ah(
Quick stop option code
), 605Bh(
Shutdown option code
) and
605Ch (Disable operation option code).
Deceleration function on the servo (MINAS-A5) side is activated when these objects is zero.
Deceleration function on the CoE (CiA402) side is activated when these objects is non-zero.
This section explains deceleration function on the servo (MINAS-A5) side.
Please refer to section 6-9-2 "4) Disable operation option code (605Ch)" of Technical Document "EtherCAT
Communication Specifications" (SX-DSV02473) for details of deceleration function on the CoE (CiA402) side.
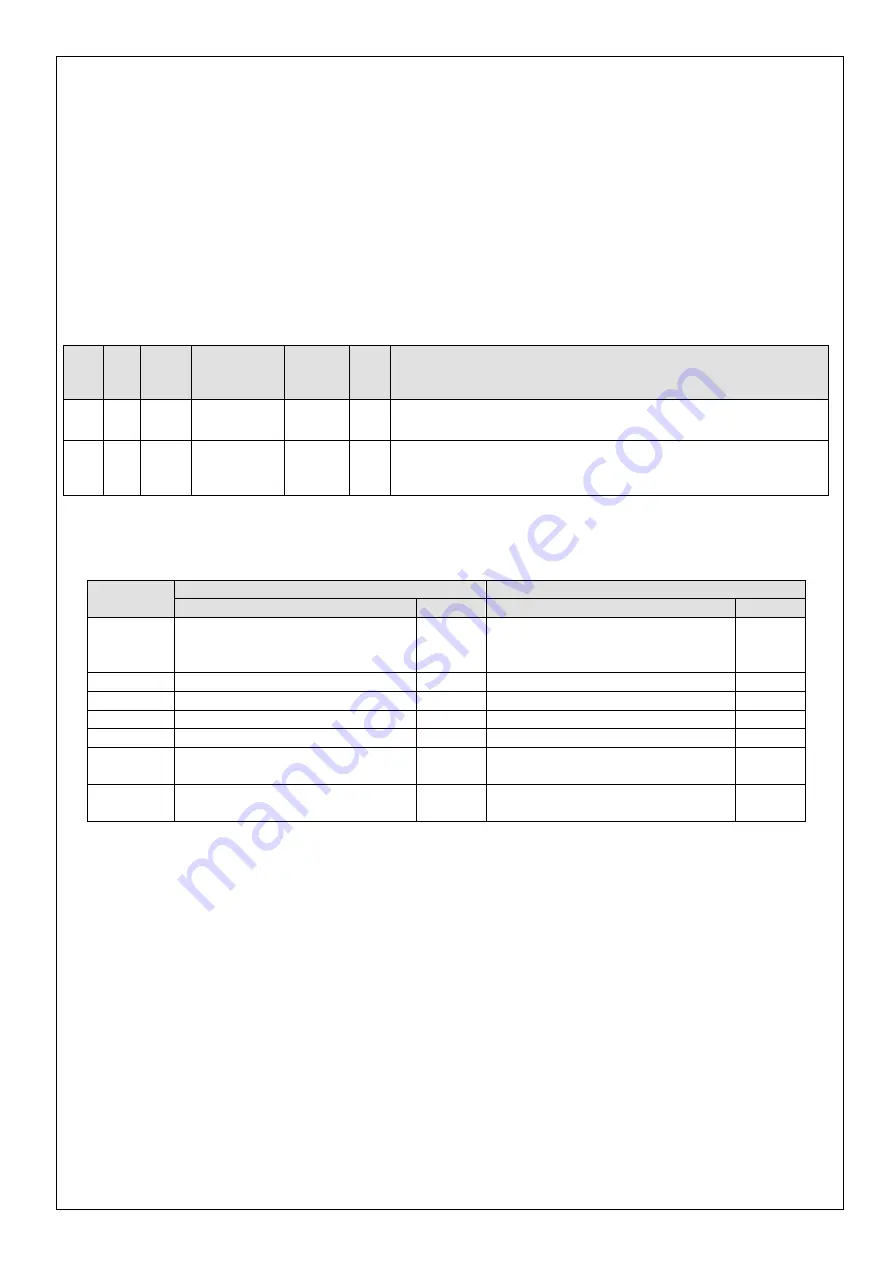
(1) Parameters
Class No.
At-
trib-
ute *1)
Title
Range
Unit
Function
5
06
B
Sequence at
Servo-Off
0–9
—
Specify the status during deceleration and after stop, after servo-off.
5
11
B
Torque setup
for emergency
stop
0–500
%
Set up the torque limit at emergency stop.
When setup value is 0, the torque limit for normal operation is applied.
*1) For parameter attribute, refer to Section 9-1.
(2) Contents
• Details of Pr 5.06 (Sequence at Servo-Off)
Pr 5.06
During deceleration *4)
After stalling (Approx.30 r/min or below)
Stopping method
Deviation
Operation after stopping
Deviation
Common
• Forcibly controls the position. *1)
• Forcibly stops position command
generation. *1)
—
• Forcibly controls the position. *1)
• Forcibly stops position command
generation. *1)
—
0,4
• Dynamic brake action
Clear *2)
• Dynamic brake action
Clear *2)
1,5
• Free run (DB OFF)
Clear *2)
• Dynamic brake action
Clear *2)
2,6
• Dynamic brake action
Clear *2)
• Free run (DB OFF)
Clear *2)
3,7
• Free run (DB OFF)
Clear *2)
• Free run (DB OFF)
Clear *2)
8
• Emergency stop *3)
• Torque limit =Pr 5.11
Clear *2)
• Dynamic brake action
Clear *2)
9
• Emergency stop *3)
• Torque limit =Pr 5.11
Clear *2)
• Free run (DB OFF)
Clear *2)
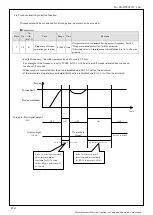
*1) During deceleration sequence or at the stop (servo OFF), the system has to control the position and to stop the
generation of internal position command.
*2) During deviation clearing process, the system causes the internal command position to follow up the feedback position.
When executing the interpolation feed system command after servo ON, re-set the command coordinate of the host
controller. The motor may operate sharply.
*3) Emergency stop refers to a controlled immediate stop with servo-on. The torque command value is limited during this
process by Pr 5.11 Emergency stop torque setup.
*4) Deceleration period is the time required for the running motor to speed down to 30 r/min. Once the motor speed drops
below 30 r/min, it is treated as in stop state regardless of its speed.
*5) If an error occurs during servo-off, follow 605Eh(Fault reaction option code). If the main power is turned off during
servo-off, follow Pr 5.07 Sequence during main power interruption.
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation







































































