





























TUNE THE SYSTEM
GETTING STARTED
MAXnet User’s Manual
2-15
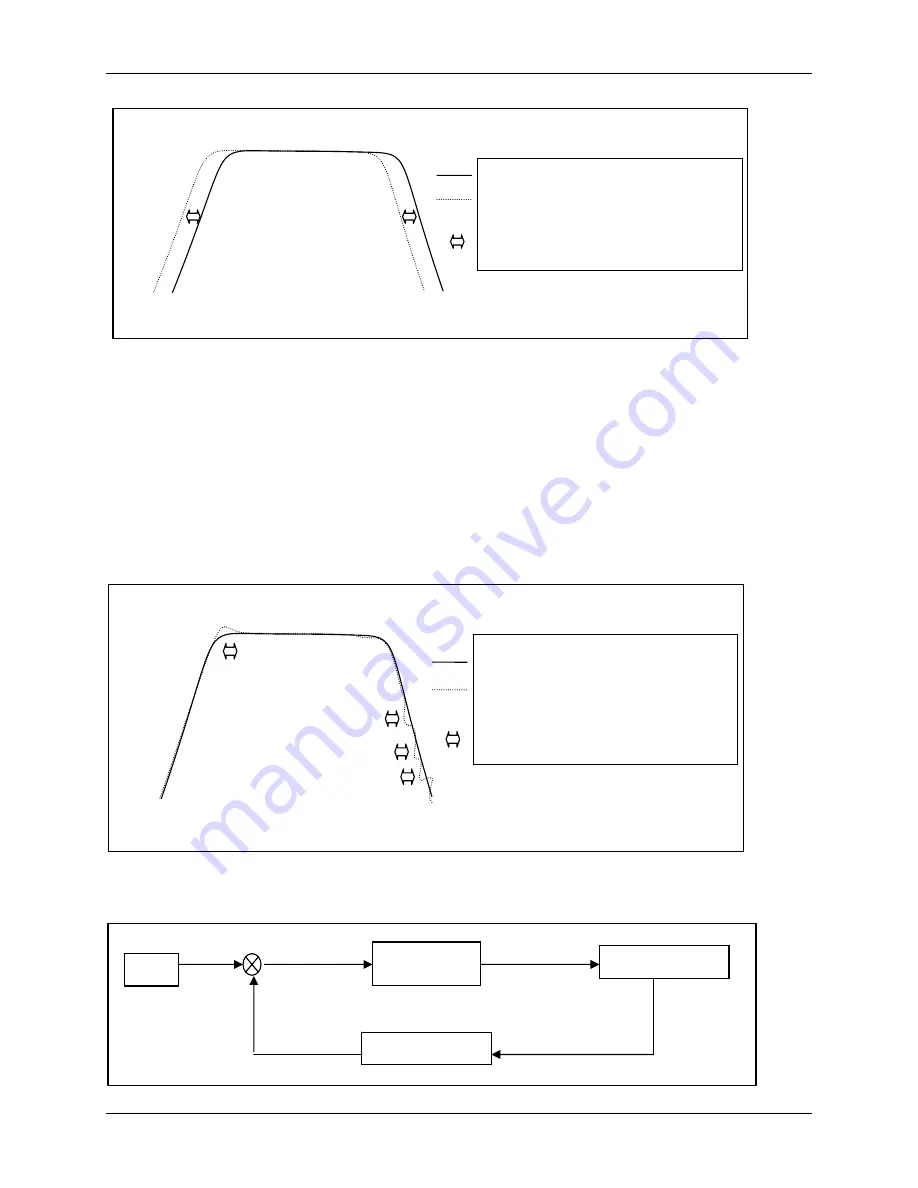
FIGURE 2-12
The KA variable is used when tuning torque controlled servos (current mode servo amplifiers.) This
is the acceleration feedforward coefficient. Systems with high inertial loads may require additional
torque during acceleration or deceleration to achieve optimum performance. KA determines how
closely the system follows the desired acceleration and deceleration portions of the motion profile.
Increasing this term reduces the following error occurring during acceleration and deceleration of the
system. Although, if KA is too large, instability may occur.
The values for KA range from 0 to 249.99.
FIGURE 2-13
The block diagram below describes the feedback loop that is taking place in the servo system:
Desired Step Response
Actual Step Response
Velocity Following Error
Desired Step Response
Actual Step Response
Acceleration/Deceleration Following
Error
PID Algorithm/
Amplifier
Motor and Encoder
Error (i.e. Position)
Input
FIGURE 2-14 FEEDBACK LOOP
Summary of Contents for MAXnet
Page 4: ...TABLE OF CONTENTS MAXnet User s Manual ii This page is intentionally left blank ...
Page 46: ...STAND ALONE COMMANDS MAXnet User s Manual 6 2 This page intentionally left blank ...
Page 48: ...SERVICE MAXnet User s Manual 7 2 This page intentionally left blank ...
Page 58: ...LIMITED WARRANTY APPENDIX A MAXnet User s Manual This page intentionally left blank ...
Page 60: ...RETURN FOR REPAIRS APPENDIX B MAXnet User s Manual This page intentionally left blank ...







































































