






















Maxiflex P3 PAC User Manual
102
-© Omniflex
UMM126XR18.pdf
•
The Primary and Secondary controllers communicate with each other through a
dedicated high speed communications channel (called the Sync. Link), used for program
synchronisation and health status reporting.
•
Each controller is connected to the I/O through an independent high speed remote I/O
network.
•
The remote I/O network connected to the Primary and Secondary controllers
communicate with a Remote I/O processor on each remote I/O base.
•
Each Remote I/O Processor can control up to 15 conventional I/O modules.
•
Up to 3 Remote I/O bases can be connected to the Remote I/O network giving a total of
45 I/O modules per redundant controller system (up to 1440 I/O using 32 channel I/O
modules).
•
Both controllers read the same input information from the common I/O via the Remote I/O
processors on each remote base in the system.
•
Only the “active” controller writes data to the Outputs.
•
When the primary controller is no longer able to control due to any internally detected
fault, then the secondary controller becomes active and takes over all tasks from the
Primary Controller including writing to the outputs.
13.4 Operating Modes of the Dual Redundant System
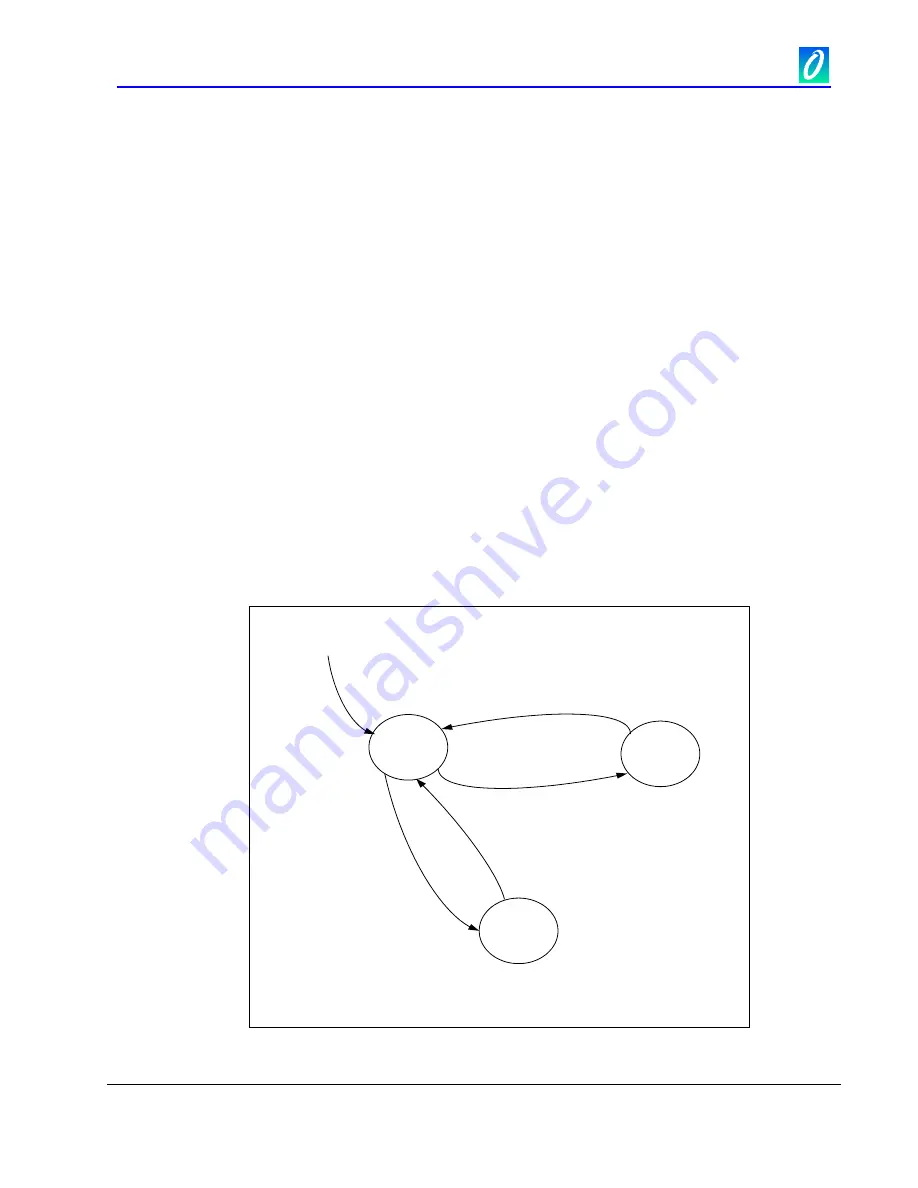
13.4.1 The Primary Controller
The Primary
Controller
operates in three distinct modes i.e. Active, Standby and Failure
mode.
A C T IV E
M O D E
P O W E R U P A N D
P R IM A R Y H E A L T H Y
F A IL U R E
M O D E
S T A N B Y
M O D E
S E T A C T IV E B Y
S E C O N D A R Y (IF P R IM A R Y
H E A L T H Y )
P R IM A R Y U N H E A L T H Y (I.E .
C O M M S F A IL U R E O R
F O R C E D C H A N G E -O V E R )
P R IM A R Y
U N H E A L T H Y (I.E .
H A R D W A R E
F A IL U R E )
P R IM A R Y
H E A L T H Y
Figure 13.2: Operating Modes of Primary Controller







































































