





























Supplementary Manual DeviceNet for NORDAC SK 200E
38
Subject to technical amendments
BU 0280 GB
4.2.3
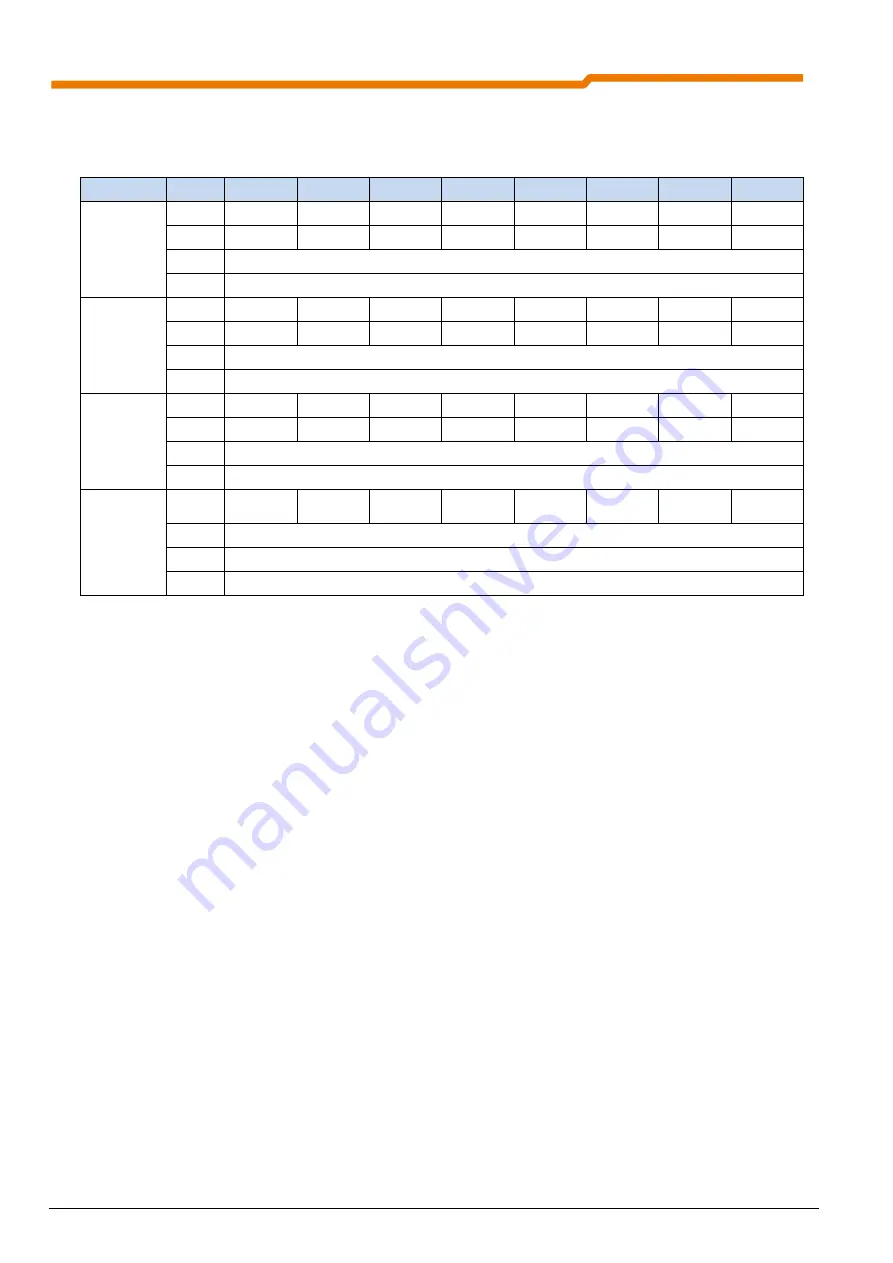
Explanation of the I/O Assembly Data for the AC Drive Profile
Instance
Byte
Bit7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
20 0
Fault
Reset
Run
Fwd
1
2
Speed setpoint (Low byte)
3
Speed setpoint (High byte)
21 0
NetRef
NetCtrl
Fault
Reset
Run Rev
Run Fwd
1
2
Speed setpoint (Low byte)
3
Speed setpoint (High byte)
70 0
Running1
Faulted
1
2
Actual speed (Low byte)
3
Actual speed (High byte)
71 0
At Ref
Ref From
Net
Ctrl From
Net
Ready
Running2
(Rev)
Running1
(Fwd)
Warning
Faulted
1
Drive State ( explanation in Class 41 Attribute 6)
2
Actual speed (Low byte)
3
Actual speed (High byte)
4.2.3.1 Description of the bits in the control and status word
Run Forward
High level = The FI is switched on and the motor accelerates to its setpoint
Low level = The motor is braked on the set ramp to 0 rpm and the FI switched off
Run Reverse
As for “Run Forward” but with the opposite direction of rotation.
Fault Reset
A Low – High flank resets an error in the FI
NetCtrl
With a High level, the control words sent via the DeviceNet bus are valid The settings P509 and P510 in the FI
are not affected
NetRef
With a High level, the setpoint words sent via the DeviceNet bus are valid The settings P509 and P510 in the
FI are not affected
Fault
High level indicates an error in the FI
Warning
High level indicates a warning in the FI. See Bit 7 in the USS status word
Run 1
FI has a clockwise rotating field
Run 2
FI has an anticlockwise rotating field
Ready
FI is switched on, i.e. voltage is applied to the motor
Ctrl From Net
The FI is controlled via DeviceNet. Only the status of “NetCtrl” is imaged in the control word. The parameters
P509 & P510 are not queried.







































































