


























IX34208a_e.doc / Aug-09
Page 15 / 40
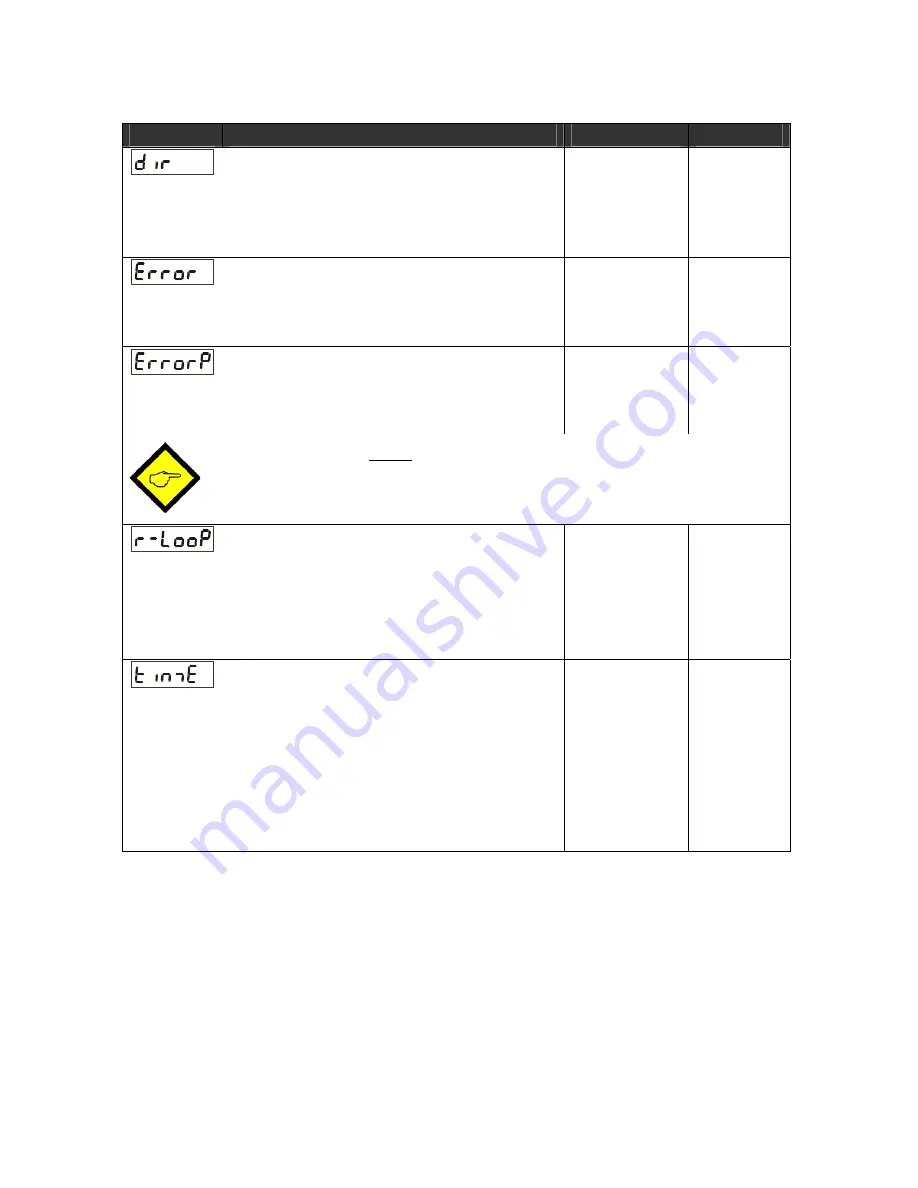
Menu
Setting Range
Default
Direction
Parameter to negate the SSI value, resulting in
reversal of the direction of the encoder count.
riGht: ascending values with forward motion
LEFt:: decreasing values with forward motion
riGht
LEFt
riGht
Error
Defines the location of the Error Bit
0: no Error Bit available
01 - 25: Location of the Error Bit
0 ... 25
00
Error-Polarity *):
Defines the polarity of the Error Bit in case of error
.
0: Error Bit is Low in case of error
1: Error bit is High in case of error
0
1
0
When an error occurs, „„Err-b“ appears on the display.
The same function can also be used to monitor the Power Failure Bit of an encoder
(mostly called „PFB“).
Round Loop
Defines the number of encoder steps per revolution
with use of the Round Loop Function (see 5.4.2).
0:
Normal display of the encoder data, no
Round Loop Function
>0:
Number of steps per Round Loop Cycle
0 ... 999999
00
Time
Sets the update cycle of the display (and of the
analogue output or the switching outputs where
applicable). The fastest possible update time is
3 msec. respectively one telegram length including 4
pause clocks. With Slave operation the next update
will occur when the unit synchronizes again to the
Master pause following to the expiration of the
update time.
0.000 ... 1.009
sec
0.01 sec