





























35
Rev. 1.0
0006302011
SSM23C User Manual
+86-400-820-9661
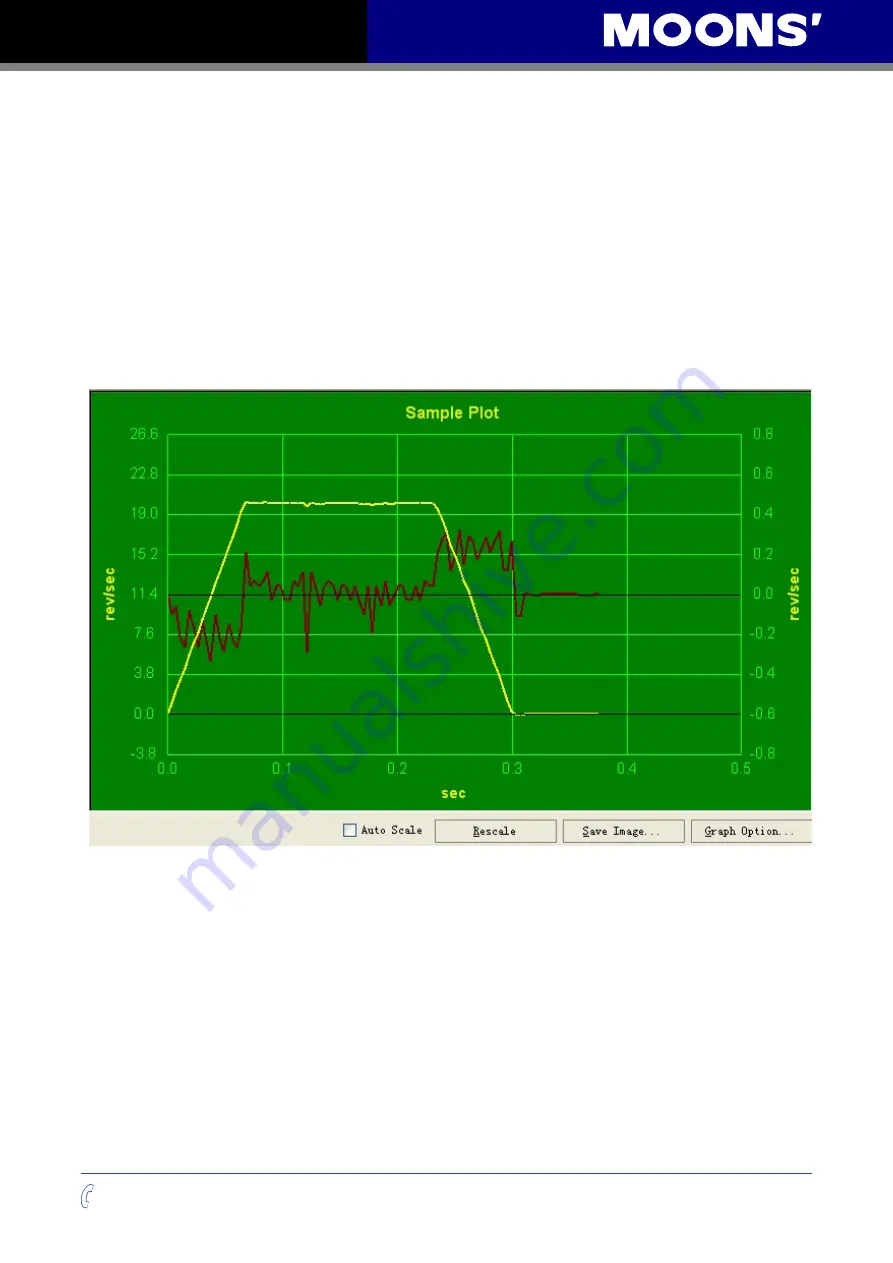
To get a good comparison between different plots where the gains have been changed, turn off
the
Auto Scale
by clearing that check box below the plot screen. When auto scaling is turned off,
the difference can be seen more clearly.
5.5.4 Adding in the FF Gain (KK) parameter
The Acceleration Feed Forward (KK) applies more current to the motor to help compensate
for high inertia in the system. In a servo system more current is typically required during the
acceleration and deceleration phases of the move profile.
A reduction in the Velocity Error peak values should then be seen. As seen in this plot with the KK
set to 3000 the peaks in the Velocity error have been reduced. With loads that have greater inertia
this can provide a significant improvement.
NOTE: The FF Term (KK) is not available when operating in the Pulse & Direction Control
Mode. Setting this value will have no effect.
If the Velocity Error goes too positive during acceleration, the adjustment was too large and the
value should be adjusted in smaller amounts until there is as near to zero error as possible. The
Rescale
button next to the
Auto Scale
may be clicked at any time to re-scale the plot on the new
Velocity Error value.
5.5.5 Filter parameter
Step-servo has a control loop filter for special situations where the motor may resonate or may
have significant audible noise. This filter is designed as a low pass type for the control loop output.
When a system is subject to mechanical resonance, this low pass filter can be set below the
natural frequency of the system so that the control loop output does not excite the resonance.