





























122
16.2.2. Erase all programs in the controller
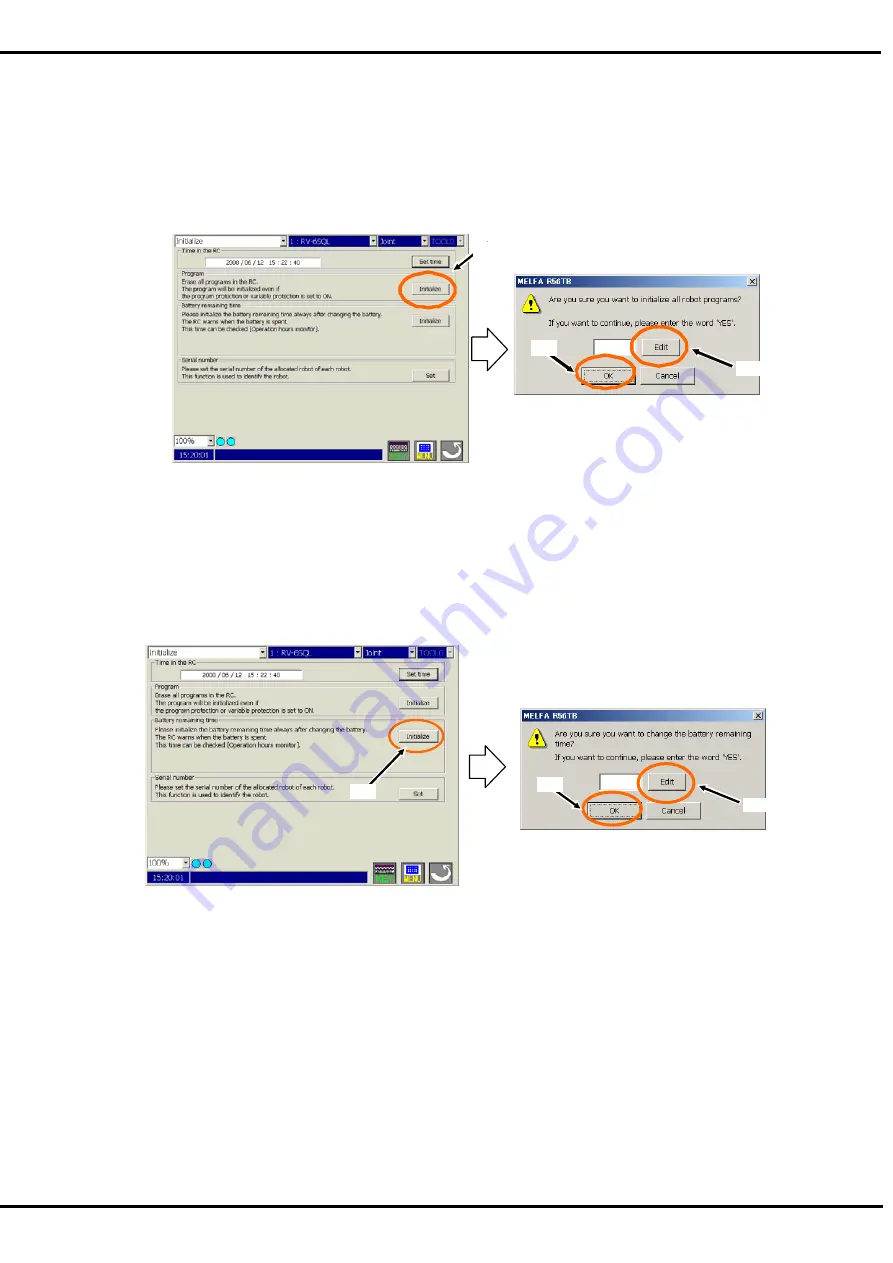
To delete all programs, follow the procedure below.
(1) Tap the [Initialize] button<a> of “program”.
(2) Tap the [Edit] button<b> of the confirmation screen.
(3) Input "YES" with the keyboard, and tap the [Enter] key.
(4) Tap the [OK] button<c> of the confirmation screen.
All programs in the robot controller are deleted by operating the above-mentioned.
< >
< >
< >
16.2.3. Initialize the battery remaining time
To initialize the battery remaining time, follow the procedure below.
(1) Tap the [Initialize] button of “battery remaining time".
(2) Tap the [Edit] button<b> of the confirmation screen.
(3) Input "YES" with the keyboard, and tap the [Enter] key.
(4) Tap the [OK] button<c> of the confirmation screen.
The battery remaining time is initialized by operating the above-mentioned.
<a>
<c>
<b>
Summary of Contents for R56TB
Page 1: ...Mitsubishi Industrial Robot CR750 CRn 700 Series R56TB R57TB Instruction Manual BFP A8684 F...
Page 4: ...8 CAUTION CAUTION WARNING...
Page 6: ......
Page 12: ......
Page 126: ...114 Current2 a...
Page 173: ...161 17 4 9 5 Hand 17 4 9 6 Warm up...
Page 174: ...162 17 4 9 7 Start each slot 17 4 9 8 Stop each slot...
Page 175: ...163 17 4 9 9 Servo ON OFF each robot 17 4 9 10 Machine lock each robot...
Page 179: ...167...