





























3Explanation of operation methods
Debugging
3-44
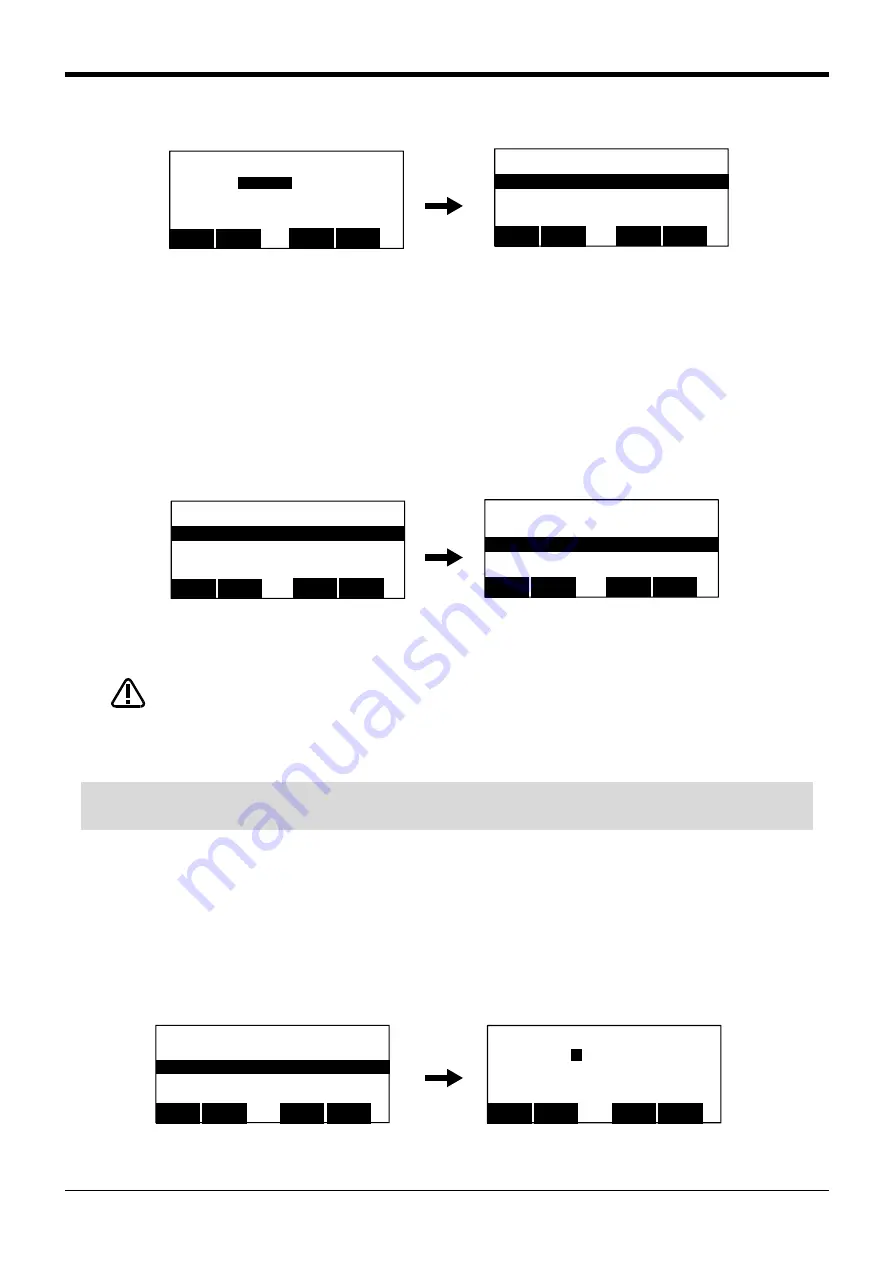
Display the inputted program of the slot number. (The following example specifies the slot 2)
4) Execution of step operation
Step feed and step return can be executed like the step operation in the command edit screen.
Only while keeping pressing the function key, execute step feed and step return separately.
If the function key is released during this step, the robot will stop.
And, detach the enabling switch (3
position switch), or push in still more strongly -- thing servo-off can be carried out and execution can be
stopped.
During execution, the lamp on the controller's [START] switch will light. If execution of the one step is
completed, LED of the [START] switch will go out and LED of the [STOP] switch will turn it on. If the [F1]
key is detached, the cursor of the T/B screen will move to the following step.
Take special care to the robot movements during automatic operation. If any
abnormality occurs, press the [EMG.STOP] switch and immediately stop the robot.
(4) Step jump
It is possible to change the currently displayed step or line.
The operation in the case of doing step operation from Step 5 as an example is shown.
1) Call Step 5.
Press the function key corresponding to "JUMP", and press the [5], [EXE] key
. The cursor moves to Step
5.
<CHECK>
SLOT (
2
)
CLOSE
123
<CHECK> SLOT 2 1 50%
1 Mov P1
2 Mvs P2
3 Dly 0.5
4 Mvs P1
BWD
123
Jump
FWD
SLOT
⇒
<CHECK> SLOT 2 1 50%
1 Mov P1
2 Mvs P2
3 Dly 0.5
4 Mvs P1
BWD
123
Jump
FWD
SLOT
⇒
<CHECK> SLOT 2 1 50%
1 Mov P1
2 Mvs P2
3 Dly 0.5
4 Mvs P1
BWD
123
Jump
FWD
SLOT
⇒
CAUTION
◇◆◇ Change of the execution step ◇◆◇
The execution step can be changed by cursor movement by the arrow key, and jump operation ("JUMP").
<PROGRAM> 1 50%
1 Mov P1
2 Mov P2
3 Mov P3
4 Mov P4
BWD
123
JUMP
FWD
⇒
<PROGRAM> 1 50%
STEP (
5
)
CLOSE
123