















2-3
FX-10GM POSITIONING CONTROLLER
SPECIFICATIONS 2
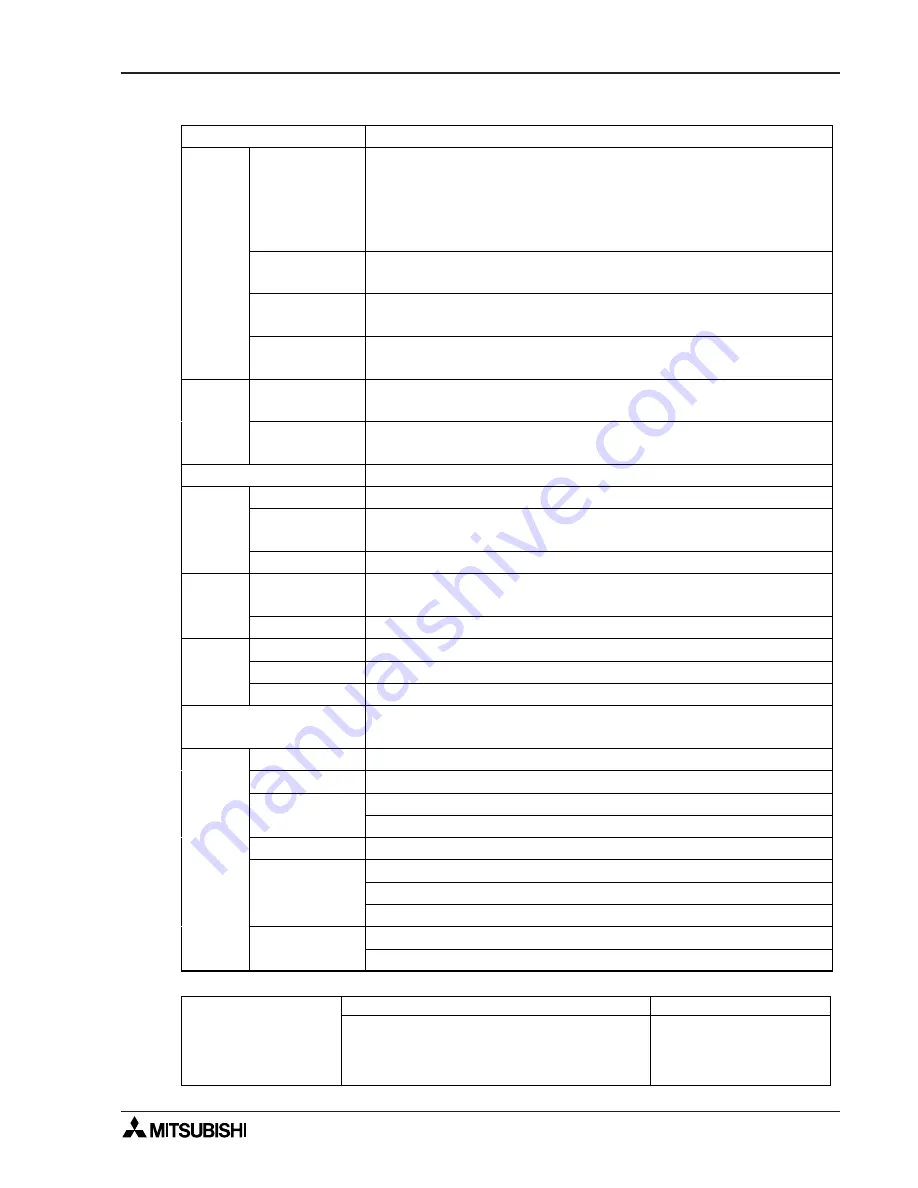
Item
Specifications
Control
inputs
Operation
system
MANU (manual), FED (manual forward rotation), RVS
(manual reverse rotation), ZRN (machine zero return),
START (automatic start), STOP (stop), manual pulse
generator (2kPPS max.), single-step operation input
(depending on parameter settings)
mechanical
system
Dog (near-point signal), LSF (forward rotation limit), LSR
(reverse rotation limit), interrupts:4 points
Servo system
SVRDY (servo ready), SVEND (servo end),
PG0 (zero-point signal)
General
purpose
General purpose:X0 to X3
Control
outputs
Servo system
RF (forward rotation pulse), RF (reverse rotation pulse),
CLR (counter clear)
General
purpose
General purpose: Y0 to Y5
Program Nos.
Ox00 to Ox99, O100 (subtask program)
Instruct-
ions
Positioning
Cod No. system (used with instruction cods), 13 types
Sequence
11 types: LD, LDI, AND, ANI, OR, ORI, ANB, ORB, SET,
RST, NOP
Application
FNC No. system, 29 types
M codes
maintask
m00 (WAIT) program stop and m02 (END) m01,m03 to m99
can be used as required (SFTER mode, WITH mode)
Subtask
m100 (WAIT) and m102 (END) can be used
Param-
eters
System setting 9 types
Positioning
27 types
I/O control
18 types
Self-diagnosis
Diagnosis is enabled by the display of parameter errors,
program errors and exernal errors with error code Noos.
Devices
Inputs
X0 to X3, X375 to X377
Outputs
Y0 to Y5
Auxilliary
relays
M0 to M511 (general purpose)
M9000 to M9175 (special purpose)
Pointers
P0 to P127
Data registers
(16 bit)
D0 to D1999 (general purpose)
D4000 to D6999 (file)
D9000 to D9313 (special purpose)
Indexes
V0 to V7 (16 bit)
Z0 to Z7 (32 bit)
Programming tool
E-20TP teaching panel
FX-PCS-KIT-GM-EE
Program (reading / writing, insertion / deletion),
parameters (reading / writing), operation monitor,
testing (jog, machine zero return,
Personal computer (PC-AT)







































































