




























The following example shows some typical configuration settings used for many common posi-
tioning applications:
Procedure:
햲
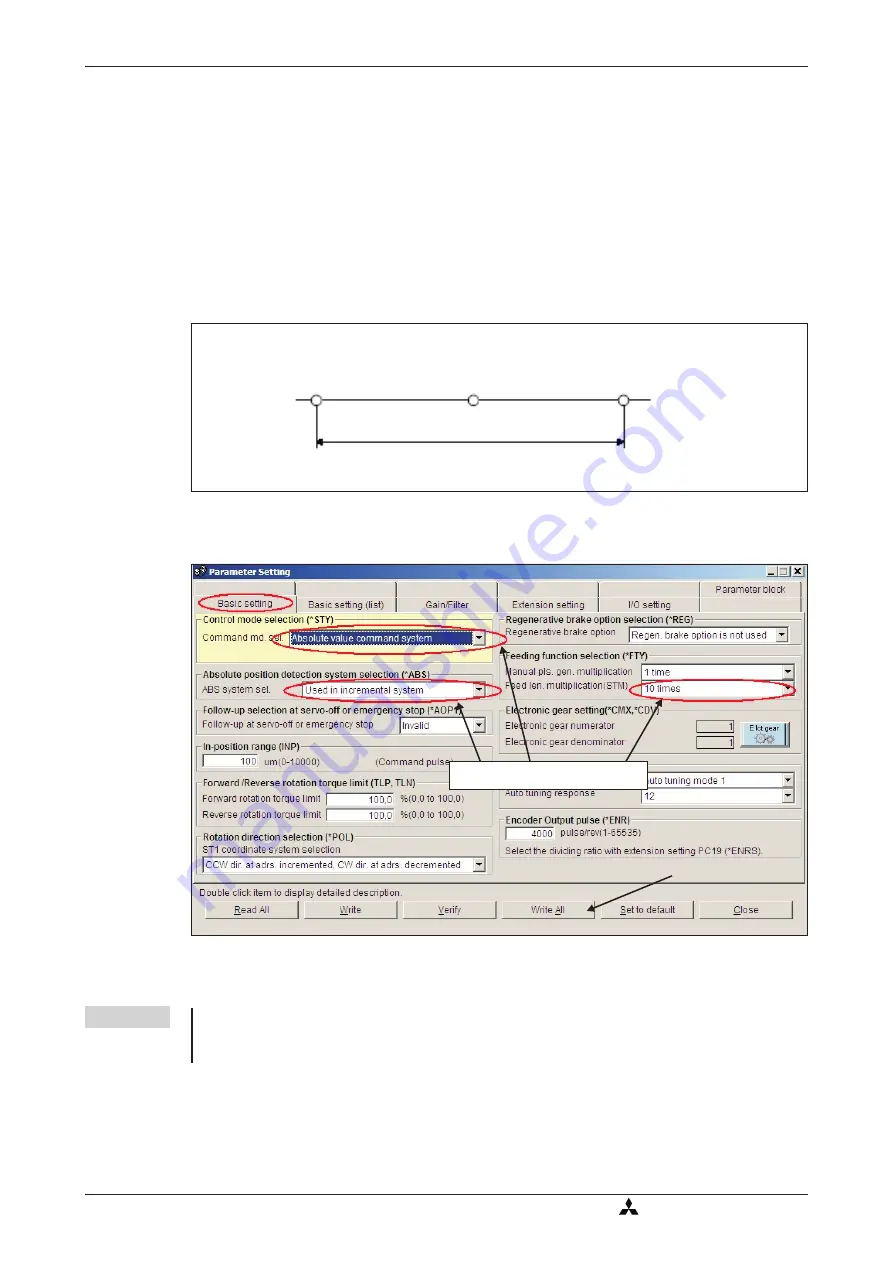
Select the incremental system for positions with PA03 *ABS.
햳
Select absolute value command mode for target positions with PA01 *STY.
햴
Set a multiplication factor with PA05 *FTY = 1 => 10 times factor.
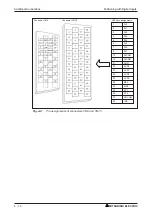
This gives us the following position system:
NOTE
If target positions are entered using the incremental system it is not possible to change the
rotation direction via the point table. In this mode the rotation direction can only be changed
with the start commands (ST1/ST2).
Configuration for Positioning
Positioning with Digital Inputs
4 - 24
MITSUBISHI ELECTRIC
Fig. 4-13: Effective range of the position values with the sample settings
Min. absolute value
−
9999.99
Max. absolute value
+9999.99
0
Range of possible position values
in [10
STM
µm]
Fig. 4-14: Relevant parameters affecting the target position setpoint values
���
���
Parameter settings for example







































































