




























3.3
Configuring Positioning Point Tables
The position values, travel speeds and acceleration and deceleration times are stored in tables
known as “point tables”. We will now go through the steps required to configure and define a
point table.
Procedure:
햲
Select the
Point Table
option from the
Point-data
menu.
햳
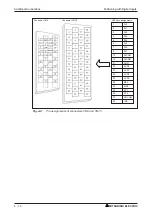
Enter the values for the movements (position, speed, acceleration and deceleration times)
in the
Point Table List
window, using one line for each movement:
– Enter target position (a) in µm x 10
STM
(STM: e in diagram).
– Enter speed (b) in rpm.
– Enter acceleration/deceleration times (c) and (d) in ms as required for the motor’s rated
speed.
햴
Save the entries by clicking on the
Write All
button.
Make sure that the
Aux. Func.
value in every line is left at the default factory setting (“0”) to
ensure that selecting a position value in the table does not inadvertently activate any subse-
quent table entries.
NOTES
In the factory default settings the absolute value command system for the target positions is
activated with parameter PA01 “*STY”. When this system is active all target position values
are referred to the physical home position. Alternatively you can also select the incremental
value command system. The absolute position detection system for the home return func-
tion can be set with parameter PA03 “*ABS” (see chapter 4.3).
Loading the factory defaults will not overwrite your point table entries.
First Functional Test
Configuring Positioning Point Tables
MR-J3-T
3 - 9
Fig. 3-5:
Point table positioning entries in the point table list window
���
���
a
{
���
e
b
c
d







































































