




























4.3
Home Position Return
At the factory the MR-J3-T servo amplifiers are configured with the incremental system acti-
vated by default (i.e. the absolute position detection system is switched off). This means that the
current position is not stored when the amplifier's power supply is switched off, making it neces-
sary to perform a return to home position every time the unit is powered up. You can configure
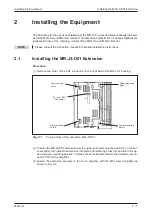
the home position return mode with Parameter PC02:
Parameter PC02
The most commonly used modes are:
1. Dogless Z-phase reference mode (A)
2. Proximity dog mode (0)
These two modes are described in detail below. Dogless Z-phase reference mode is suitable for
simple applications. Dog mode is frequently used for standard applications.
4.3.1
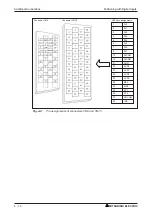
Dogless Z-phase reference mode
In this mode the Z-phase of the rotary encoder (zero position of the encoder) is used as the
machine's physical home position. However, it is quite rare to be able to configure a machine so
that its physical home position exactly matches the Z-phase of the encoder. It is thus almost
always necessary to enter an offset (shift) with parameter PC06.
After activation of the forward start command ST1 (or reverse ST2) the home position return is
initiated by parameter PC04 (“home position return speed”). When the Z-phase signal from the
encoder is registered the servo motor brakes to a halt. After this a precise return to home is per-
formed at creep speed with parameter PC05.
The physical home position can be shifted in relation to the zero position of the encoder
(Z-phase) with the home position offset (shift) defined with parameter PC06. Parameter PC07
can be used to define a home position value other than zero.
When the home position return has been completed successfully the servo amplifier activates
the ZP signal.
Positioning with Digital Inputs
Home Position Return
MR-J3-T
4 - 15
Home position return modes
0: Proximity dog mode
1: Count mode
2: Data setting mode
3: Stopper mode
4: Ignore home position
5: Dog mode, rear end reference
6: Count mode, front end reference
7: Dog cradle mode
8: Dog mode, last Z-phase reference
9: Dog mode, front end reference
A: Dogless Z-phase reference







































































