





























MiR100, MiR200 & MiRHook Risk Analysis
Copyright Mobile Industrial Robots 2019
Page
20
of
35
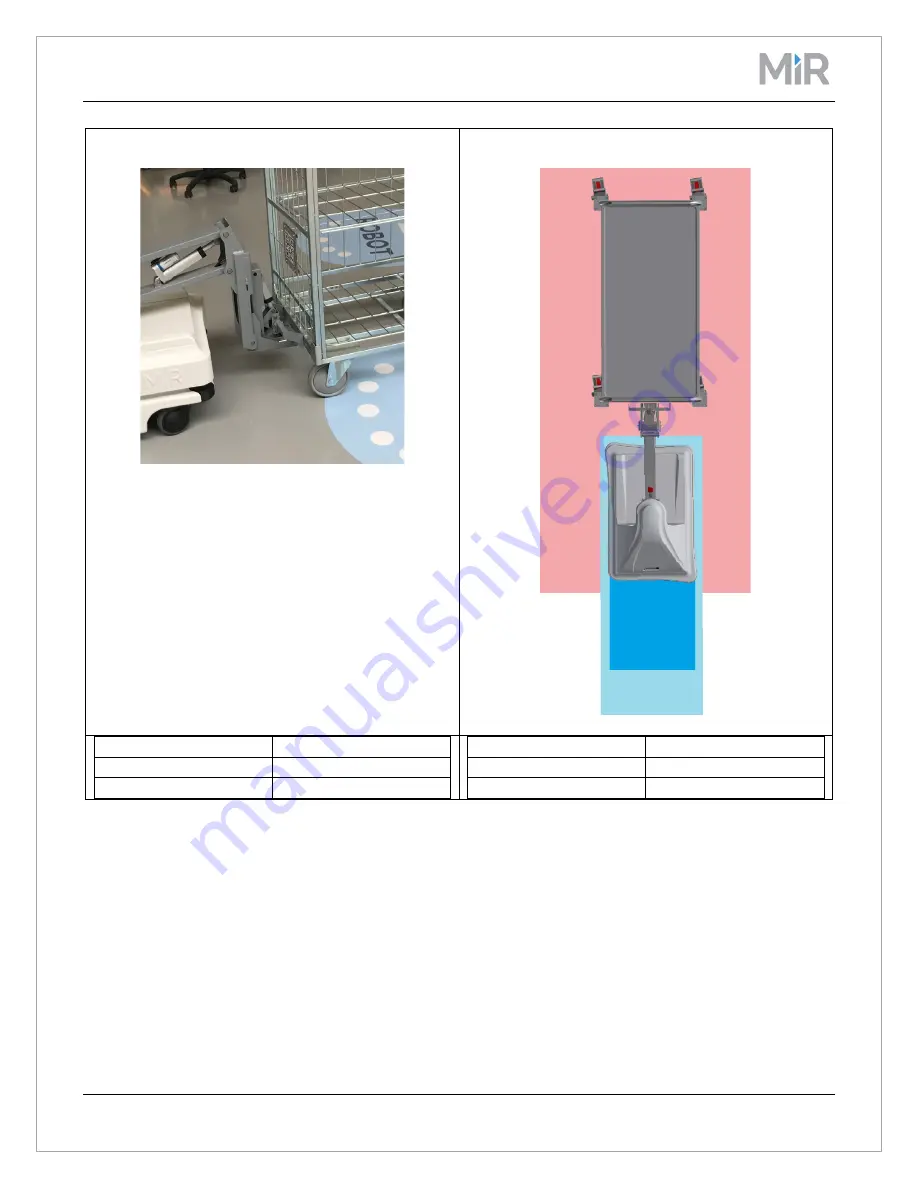
Phase 7: Locking to cart
Phase 8: Normal driving position
Maximum speed [m/s]
-0.3
Awareness indicator
Yes
Operating hazard zone
No
Maximum speed [m/s]
1.5 (1.1)
Awareness indicator
Yes
Operating hazard zone
No