





























DMU380SA Series
User’s Manual
________________________________________________________________________
Doc# 7430-0026 Rev.01
Page 27
4.2.2
IMU380SA Built-In Test
The IMU380SA Built-In Test capability allows users of the IMU380SA to monitor
health, diagnostic, and system status information of the unit in real-time. The Built-In
Test information consists of a BIT word (2 bytes) transmitted in every measurement
packet.
In addition, there is a diagnostic packet ‘T0’ that can be requested via the Get
Packet ‘GP’
command which contains a complete set of status for each hardware and
software subsystem in the IMU380SA. See Sections 6-8 Programming Guide, for details
on the ‘T0’ packet.
The BIT word, which is contained within each measurement packet, is detailed below.
The LSB (Least Significant Bit) is the Error byte, and the MSB (Most Significant Bit) is
a Status byte with programmable alerts. Internal health and status are monitored and
communicated in both hardware and software. The ultimate indication of a fatal problem
is the masterFail flag.
The masterStatus flag is a configurable indication that can be modified by the user. This
flag is asserted as a result of any asserted alert signals which have been enabled. See
Advanced BIT (Section 9) for details regarding the configuration of the masterStatus
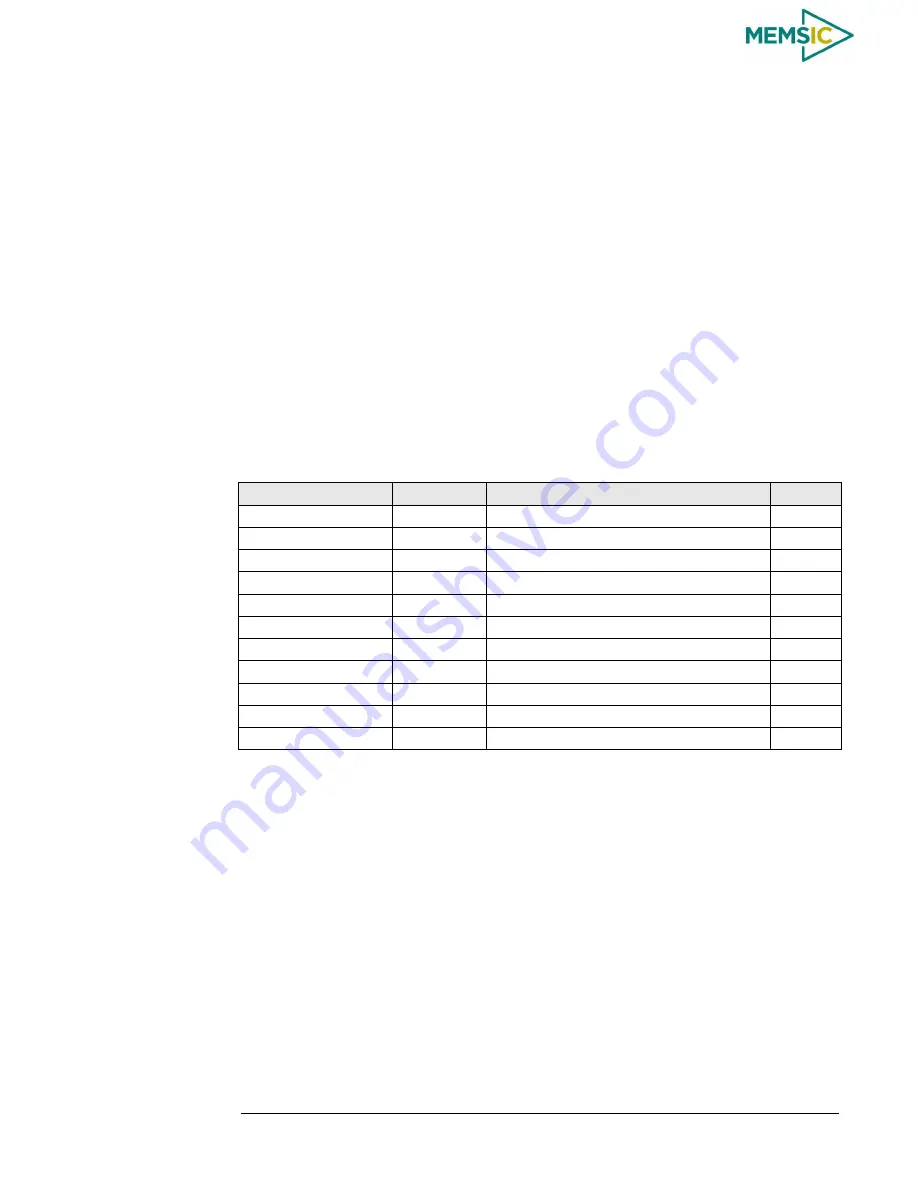
flags. Table 9 shows the BIT definition and default settings for BIT programmable alerts
in the IMU380SA.
Table 9.
IMU380SA Default BIT Status Definition
BITstatus Field
Bits
Meaning
Category
masterFail
0
0 = normal, 1 = fatal error has occurred
BIT
HardwareError
1
0 = normal, 1= internal hardware error
BIT
comError
2
0 = normal, 1 = communication error
BIT
softwareError
3
0 = normal, 1 = internal software error
BIT
Reserved
4:7
N/A
masterStatus
8
0 = nominal, 1 = Alert, Sensor Over Range
Status
hardwareStatus
9
Disabled
Status
comStatus
10
Disabled
Status
softwareStatus
11
Disabled
Status
sensorStatus
12
0 = nominal, 1 = Sensor Over Range
Status
Reserved
13:15
N/A
The IMU380SA also allows a user to configure the Status byte within the BIT message.
To configure the word, select the BIT Configuration tab from the Unit Configuration
menu. The dialog box allows selection of which status types to enable (hardware,
software, sensor, and comm). In the case of the IMU380SA which has fewer features and
options than other DMU380SA Series products, the only meaningful parameter is sensor
over-range. It is recommended that users leave the default configuration, which is
sensorStatus enabled and flag on sensor over-range. The over-range only applies to the
rotational rate sensors. Because instantaneous acceleration levels due to vibration can
exceed the accelerometer sensor range in many applications, none of the DMU380SA
Series products trigger over-range on accelerometer readings.
VG380SA Theory of Operation
4.3
The VG380SA supports all of the features and operating modes of the IMU380SA, and it
includes additional internal software, running on the ARM processor, for the computation
of dynamic roll and pitch. The product name, VG380SA, stands for Vertical Gyro 380,
and it is indicative of the vertical gyro functionality that the VG380SA replicates by







































































