





























DMU380SA Series
User’s Manual
________________________________________________________________________
Doc# 7430-0026 Rev.01
Page 23
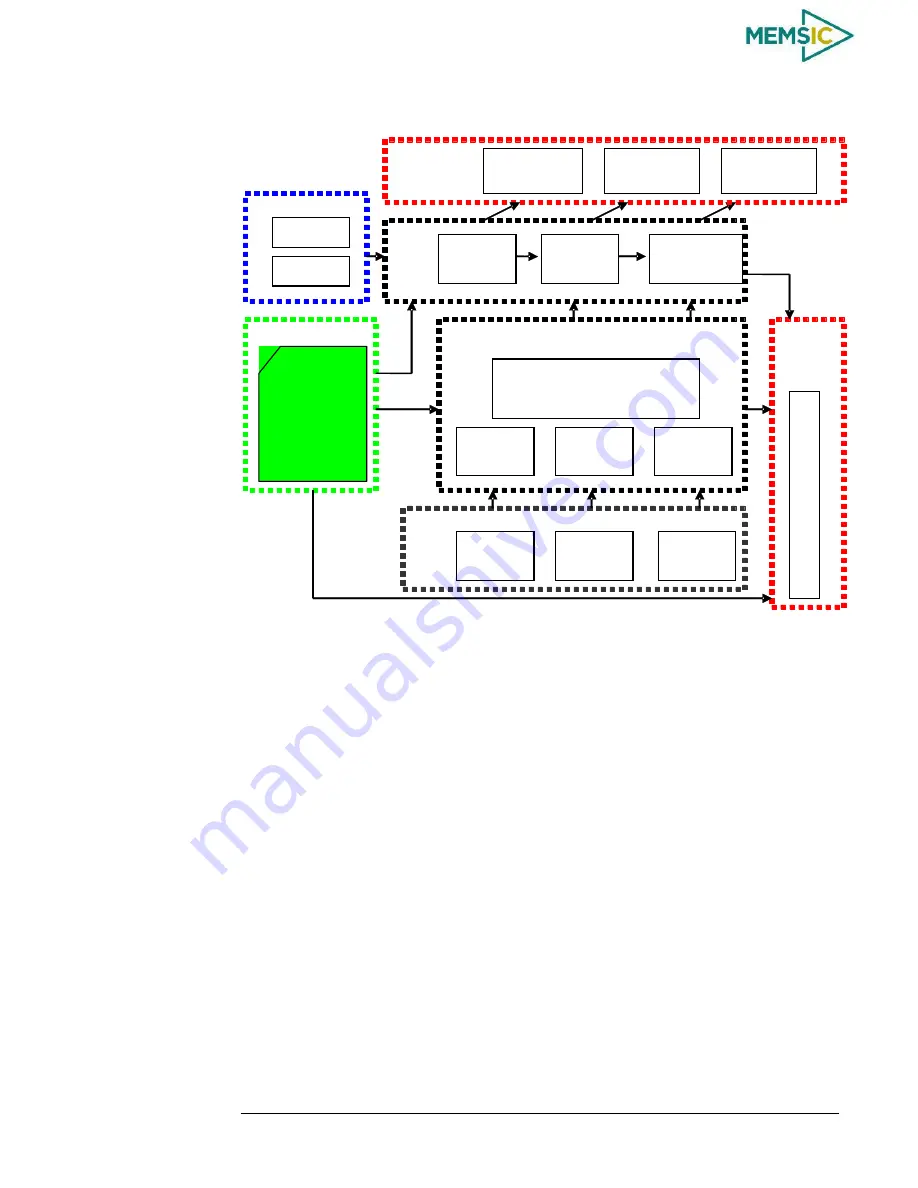
Figure 14.
DMU380SA Series Software Block Diagram
Simplified functional block diagrams for INS, AHRS and VG series products derived
from Figure 14 are shown in Figure 15 to highlight key features of each product. The
DMU380SA Series products are mainly differentiated by types of aiding sensors used in
the EKF for the drift correction of the 6-DOF inertial sensor cluster.
For the AHRS product, a 3-axis magnetometer is used for correcting the drift on
yaw/heading angle. For the INS product, a 3-axis magnetometer and a GPS receiver are
used for correcting the drift on yaw/heading angle, increasing the accuracy of the attitude
estimation by incorporating these sensor signals into the EKF, and providing a navigation
solution. The common aiding sensor for the drift correction for the attitude (i.e., roll and
pitch only) is a 3-axis accelerometer. This is the default configuration for the VG product.
X / Y / Z Body
Accelerometers
6-DOF Sensor Cluster
Sensor
Calibration
Axes Rotation
GPS Data
Internal/External
Kalman
Filter and Dynamic State Model
Integration to 100 Hz
Velocity, GPS
Position Output
Hard/Soft Iron
Calibration
UseMags
X / Y / Z
Magnetometers
INS/AHRS only
IMU
-
Scaled Packets
(S0, S1)
All Units
INS/AHRS/VG/IMU
Gravity Reference
Turn Rate
(Internal
Computation)
Free Integrate
TurnSwitch
Threshold
UseGPS
Stationary Yaw
Lock
X / Y / Z Body
Rates
200Hz
Signal
Proc.
Chain
Extended Kalman Filter (EKF)
Drift Correction Module
VG/AHRS
–
Angle
Packets
(A1, A2)
INS/AHRS/VG
INS
-
Nav
Packets
(N0, N1)
INS/AHRS/VG
Integration to
Attitude
Unit Settings & Profile*
Communication Settings
Axes Orientation
Low Pass Filtering
Free Integrate
UseGPS
UseMags
TurnSwitch
Threshold
DynamicMotion
Restart On
Overange
Dynamic Motion
Programmable BIT Alerts
Aiding Sensors
Built In Test
& Status
Data
Available to
User
Measurement
Data Available to
User (Fixed Rate
or Polled)
Status
Packet
(T0)







































































