





























3DM-CX5-GNSS/INS
User Manual
31
3.
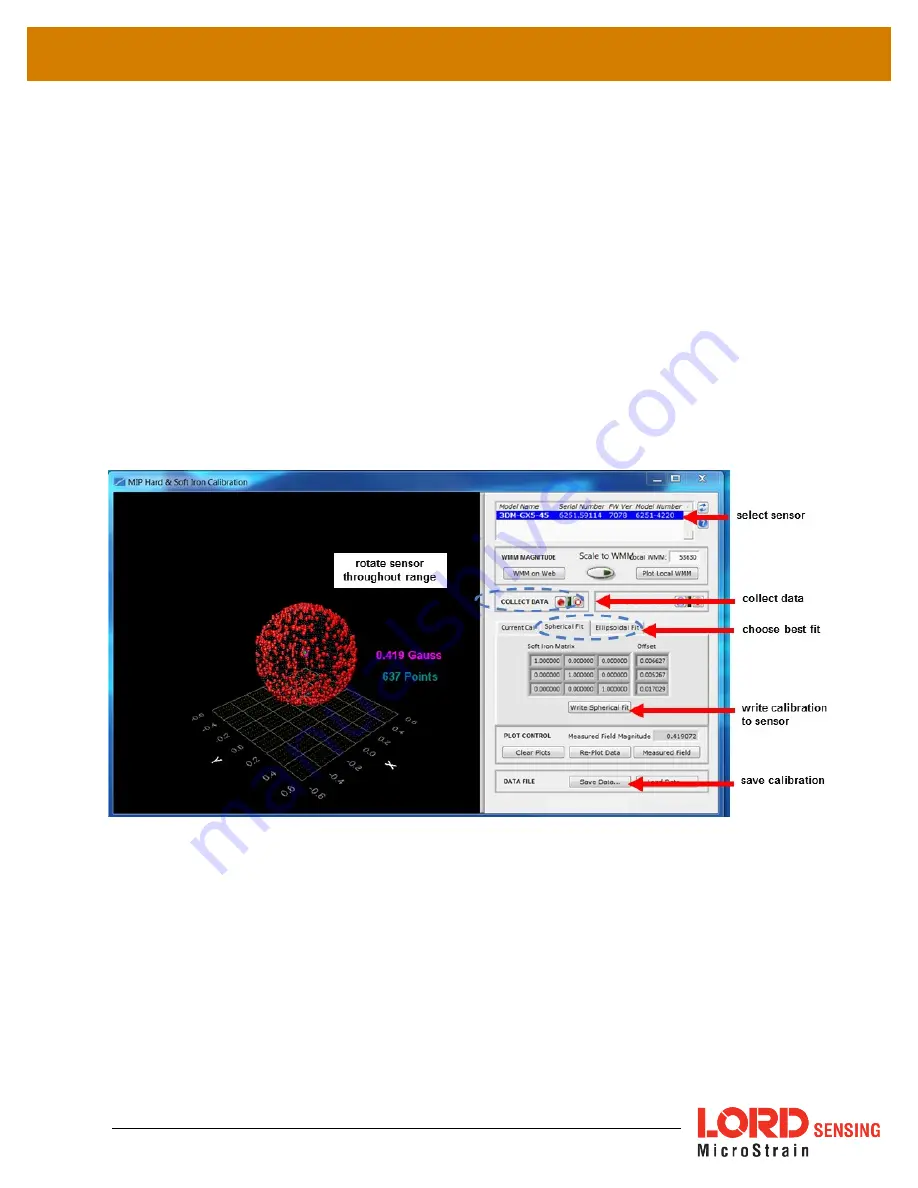
The sensor should automatically appear in the sensor list. If not, use the Refresh button
to query it and then select the sensor (
4.
Select the Arm Recording button next to Collect Data. The software will begin taking
readings, as indicated by the points counter in the graphing window. The maximum
number of points is 1000, however 100 is usually adequate. As the readings are taken,
rotate the sensor or sensor platform in all possible directions to get a complete profile of
the baseline magnetic influences throughout the sensor frame. Data points will appear
on the graph in red. For mobile sensor platforms, such as ground vehicles, move the
platform as much as possible to simulate actual use without exposing it to excessive
magnetic sources (such as driving over railroad tracks or near steel pilings). The intention
is to get a baseline of the platform in a neutral environment that still accounts for the
platform itself in all orientations. For stationary platforms the baseline may include
significant magnetic influences that will be present during operation.
Figure 27. Collect Calibration Data
5.
When all possible rotations are completed, select "Stop Streaming" next to Collect Data,
and then select Save Data to save the calibration data points on the host computer.
6.
Click the Spherical Fit or Ellipsoid Fit button, depending on the application (
). Spherical Fit is often best for applications with calibration
rotations restricted to a 2D plane: for example, a ground vehicle or a boat, because it will
not likely not be rotated on all three axis. Ellipsoid Fit is generally a better correction
when soft iron effects are present but only if enough data points can be collected in all







































































